비선형 실시간 학습 및 모델프리 제어의 안정성 보장
초록
본 논문은 입력‑출력 관계가 미지인 비선형 시스템에 대해, 이산 시간으로 구현 가능한 모델프리 제어 프레임워크를 제시한다. 유한시간 안정성을 갖는 관측기와 추정기를 설계하여 실시간으로 초국부 모델을 학습하고, 이를 이용해 원하는 출력 궤적을 추적한다. 제안된 방법은 비선형 안정성을 이론적으로 보증하며, 측정 잡음 및 모델 변동에 대한 강인성을 제공한다.
상세 분석
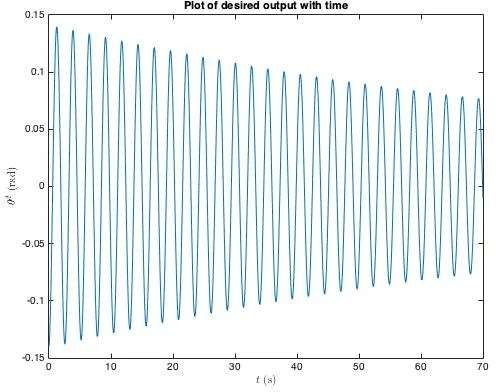
이 논문은 기존 모델프리 제어가 흔히 제공하지 못하는 비선형 시스템에 대한 전역적인 안정성 보장을 목표로 한다. 가장 핵심적인 기여는 세 가지 단계로 구성된 통합 프레임워크이다. 첫 번째 단계에서는 출력 신호에 존재하는 잡음을 제거하고, 실제 출력과의 오차를 유한시간 안에 0으로 수렴시키는 Hӧlder 연속형 관측기를 설계한다. 이 관측기는 전통적인 리니어 필터와 달리 비선형 Lyapunov 함수를 이용해 이산 시간에서의 유한시간 안정성을 증명한다. 두 번째 단계에서는 ‘초국부 모델(ULM)’이라 명명된 입력‑출력 관계를 실시간으로 추정한다. 여기서는 과거 입력‑출력 데이터를 이용해 비선형 함수 $를 근사하고, 추정 오차가 모델이 정적일 경우 유한시간 내에 정확히 0으로 수렴함을 보인다. 모델이 시간에 따라 제한된 변화를 보일 경우에도 오차는 유계 영역에 머무른다. 중요한 점은 이 추정기 역시 유한시간 안정성을 갖도록 설계되어, 제어 루프와 독립적으로 설계할 수 있는 비선형 분리 원리를 제공한다. 세 번째 단계는 앞서 얻은 정제된 출력과 추정된 초국부 모델을 기반으로, 원하는 출력 궤적을 추적하기 위한 비선형 피드백 제어법을 제시한다. 제어 법칙은 Lyapunov 기반의 이산 시간 설계 기법을 활용해, 추적 오차가 먼저 유한시간 내에 특정 매니폴드로 수렴하고, 그 매니폴드 내에서 지수적으로 0에 접근하도록 보장한다. 논문은 이러한 설계 전 과정을 정리한 수학적 가정(입력‑출력 제어 가능성, ν 차수 존재 등)과 함께, Lemma 1을 통해 이산 시간 시스템에서의 유한시간 안정성 조건을 새롭게 제시한다. 또한, 제안된 관측기와 추정기의 로버스트 특성을 분석하여, 잡음과 모델 변동에 대한 내성을 정량적으로 논의한다. 마지막으로, 2차 비선형 시스템(카트‑인버티드 펜듈럼)을 대상으로 한 시뮬레이션 결과는 제어법이 불안정한 시스템에서도 원하는 궤적을 정확히 추적함을 보여준다. 전체적으로 이 논문은 비선형 모델프리 제어에 대한 이론적 기반을 강화하고, 실시간 구현 가능성을 높인 점에서 학계와 산업 현장 모두에 큰 의미를 가진다.
댓글 및 학술 토론
Loading comments...
의견 남기기