혼합 교통 상황에서 협동 램프 제어의 최신 동향
초록
본 논문은 인간 운전 차량과 연결·자동화 차량(CAV)이 공존하는 혼합 교통 환경에서의 시스템‑와이드 램프 제어를 위한 계층적 아키텍처를 제시하고, 교통 상태 추정, 전통적 램프 메터링, 운전자 행동 모델링, CAV 협동 병합 등 핵심 구성요소에 대한 최신 연구들을 종합적으로 리뷰한다.
상세 분석
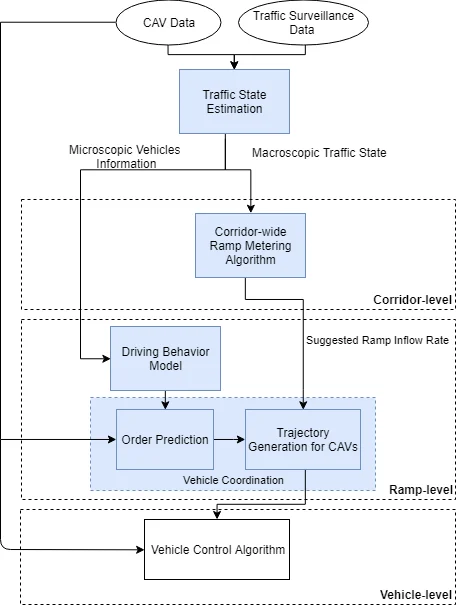
이 논문은 기존의 인간 운전 차량 전용 램프 메터링이 한계에 봉착한 상황에서, CAV 기술이 제공하는 실시간 고해상도 데이터와 차량 제어 능력을 활용해 전체 고속도로 네트워크의 흐름을 최적화하려는 시도를 체계적으로 정리한다. 먼저 제안된 3계층 시스템 아키텍처는(1) 실시간 데이터 프로세서, (2) 교통 상태 추정 모듈, (3) 상·하위 레벨 제어기로 구성되며, 각 계층은 혼합 교통의 특성을 반영하도록 설계되었다. 교통 상태 추정 파트에서는 모델 기반(EKF, CTM, LWR 등), 학습 기반(KNN, 딥러닝) 및 스트리밍 데이터 기반(관측자 방법, 최소 센서 요구) 접근법을 비교하고, 특히 CAV가 제공하는 모바일 센서 데이터가 낮은 관측률에서도 높은 정확도의 추정을 가능하게 함을 강조한다. 램프 메터링 부분에서는 규칙 기반(ALINEA, SWARM, ZONE 등), 제어 기반(LQ, MPC) 및 최근의 학습 기반(ANN, 강화학습) 방법을 분류하고, 각 방법이 혼합 교통에서 요구되는 안전·효율·탄소 배출 저감 목표를 어떻게 충족시킬 수 있는지를 분석한다. 운전자 행동 모델링에서는 인간 운전자의 속도 유지, 차간 거리, 병합 갭 수용 등을 정량화한 모델들을 검토하고, 이러한 모델이 CAV의 중앙 집중식 궤적 생성에 어떻게 활용될 수 있는지를 논의한다. 마지막으로 CAV 협동 병합 전략은 두 단계(차량 순서 예측 → 중앙 집중식 궤적 제어)로 구성되며, TOA 기반 순서 예측, 안전 제약을 만족하는 최적 궤적 계산, 그리고 차량 수준의 트랙킹 제어가 핵심 흐름으로 제시된다. 전반적으로 논문은 기존 연구들을 체계적으로 정리하면서, 혼합 교통 상황에서 시스템‑와이드 최적화를 달성하기 위해서는 (1) 고정식·이동식 센서 융합을 통한 정확한 상태 추정, (2) 실시간 교통 흐름에 적응 가능한 메터링 알고리즘, (3) 인간 운전 행동을 반영한 CAV 궤적 설계, (4) 중앙·분산 협조 제어 프레임워크가 동시에 필요함을 강조한다. 또한 현재 연구의 한계—예를 들어, 높은 CAV 침투율 가정, 실시간 연산 부하, 안전 검증 부족—을 지적하고, 데이터 프라이버시, 다중 목표 최적화, 실험 기반 검증 등의 향후 연구 방향을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기