최적 선형 동적 재생 공격 탐지 방법
본 논문은 Kalman 필터와 LQG 제어기를 갖는 선형 확률 시스템에서 재생 공격을 탐지하기 위한 동적 공격 탐지기를 설계한다. 시스템 안정성을 유지하면서 잔차 신호를 불안정하게 만들어 공격을 드러내고, 설계 파라미터를 조정해 탐지율을 조절한다. 또한 탐지 신호가 제어 성능에 미치는 손실을 최소화하는 최적화 문제를 제시하고, 시뮬레이션을 통해 기존 화이트 노이즈 워터마킹 방식보다 우수함을 입증한다.
저자: Amir Khazraei, Hamed Kebriaei, Farzad Rajaei Salmasi
본 논문은 사이버‑물리 시스템(CPS)에서 흔히 발생하는 재생 공격을 효과적으로 탐지하기 위한 새로운 동적 공격 탐지기 설계 방법을 제시한다. 시스템 모델은 선형 시불변(LTI) 확률 시스템으로, 상태 방정식 x(t+1)=Ax(t)+Bu(t)+w(t), 출력 방정식 y(t)=Cx(t)+v(t) 로 정의된다. 여기서 w(t)와 v(t)는 각각 공분산 Q, R을 갖는 백색 가우시안 잡음이며, 초기 상태는 평균 μ, 공분산 Σ(0)를 갖는 정규분포이다. 제어기는 LQG 설계에 따라, Kalman 필터를 이용한 상태 추정 x̂(t|t−1)와 LQR 이득 K를 사용해 u(t)=K x̂(t) 로 구성된다.
재생 공격은 두 단계로 진행된다. 첫 단계에서 공격자는 과거 구간(−τ,…,−1) 동안 센서 데이터를 기록하고, 두 번째 단계에서는 현재 구간(0,…,τ−1) 동안 기록된 데이터를 재생함으로써 시스템을 속인다. 동시에 입력 채널을 통해 파괴적 신호 f(t)를 주입한다. 공격이 진행되는 동안 시스템은 실제 상태와 추정 상태가 일치하지 않음에도 불구하고, 잔차 r(t)=y(t)−C x̂(t|t−1) 은 정상적인 혁신(innovation) 과정과 동일한 통계적 특성을 유지한다. 이는 Γ=(A+BK)(I−LC) 가 Schur(안정)인 경우, 잔차가 정상 분포를 따르며 탐지가 어려워지는 원인이다.
이를 해결하기 위해 저자들은 “동적 공격 탐지 신호 ξ(t)”를 도입한다. ξ(t)는 내부 동역학 ζ(t)를 통해 생성되며, ζ(t+1)=Â ζ(t)+M̃ (y(t)−C x̂(t)) , ξ(t)=K̃ ζ(t) 로 정의된다. 여기서 Â, M̃, K̃는 설계자가 선택할 수 있는 파라미터이며, 시스템 모델과 출력‑추정 오차에 기반한다. 제어 입력은 기존 LQG 입력 K x̂(t) 에 ξ(t) 를 더한 형태 u(t)=K x̂(t)+ξ(t) 로 구성된다.
첫 번째 설계 목표는 공격이 없을 때 시스템이 여전히 안정하게 동작하도록 하는 것이다. 이를 위해 전체 폐루프 행렬 Θ를 구성하고, Θ가 Schur가 되기 위한 충분조건으로 Â가 Schur임을 보인다(Θ는 상삼각 형태이며, A+BK와 (I−LC)A는 이미 안정). 따라서 Â의 스펙트럼을 적절히 선택하면 시스템 안정성을 보장한다.
두 번째 목표는 ξ(t) 가 잔차 r(t) 에 직접적인 영향을 주지 않도록 하는 것이다. 증명은 ξ(t) 가 입력 u(t) 에만 추가되고, 잔차는 추정 오차 ē(t)=x(t)−x̂(t|t−1) 에 의해 결정되며, ē(t+1)=A(I−LC)ē(t)+ALv(t)+w(t) 로 전개된다. 여기서 ξ(t) 가 A와 L에 독립적이므로, r(t)=C ē(t)+v(t) 에서는 ξ(t) 가 사라진다. 따라서 공격 탐지에 필요한 불안정성은 오직 시스템 고유 동역학에 의해 유도된다.
실제로, ξ(t) 가 시스템에 주입되면 전체 폐루프 행렬에 새로운 고유값이 추가될 수 있다. 이 고유값이 단위 원 밖에 있으면, 추정 오차와 함께 잔차 r_a(t) 가 시간에 따라 발산한다. 발산이 발생하면 가중 잔차 g(t)=r_aᵀH⁻¹r_a 가 임계값 η 를 초과하고, 알람 윈도우 T 내에서 다수의 알람이 발생해 공격을 신속히 탐지한다. 즉, Γ가 안정인 경우에도 ξ(t) 로 인해 새로운 불안정 모드가 생성되어 재생 공격을 드러낼 수 있다.
하지만 ξ(t) 가 제어 입력에 포함되면 제어 성능에 손실이 발생한다. 이를 정량화하기 위해 저자들은 다음과 같은 최적화 문제를 제시한다. 목적함수는 기존 LQG 비용 J에 ξ(t) 로 인한 추가 입력 에너지와 상태 편차를 포함한다. 제약조건은 “탐지율 ≥ γ”(즉, 알람 발생 확률이 일정 수준 이상)와 “Â는 Schur”이다. 이 문제는 LMI 형태로 변환되어 수치적으로 해결 가능하며, 설계자는 원하는 탐지율에 맞춰 손실을 최소화하는 파라미터를 얻을 수 있다.
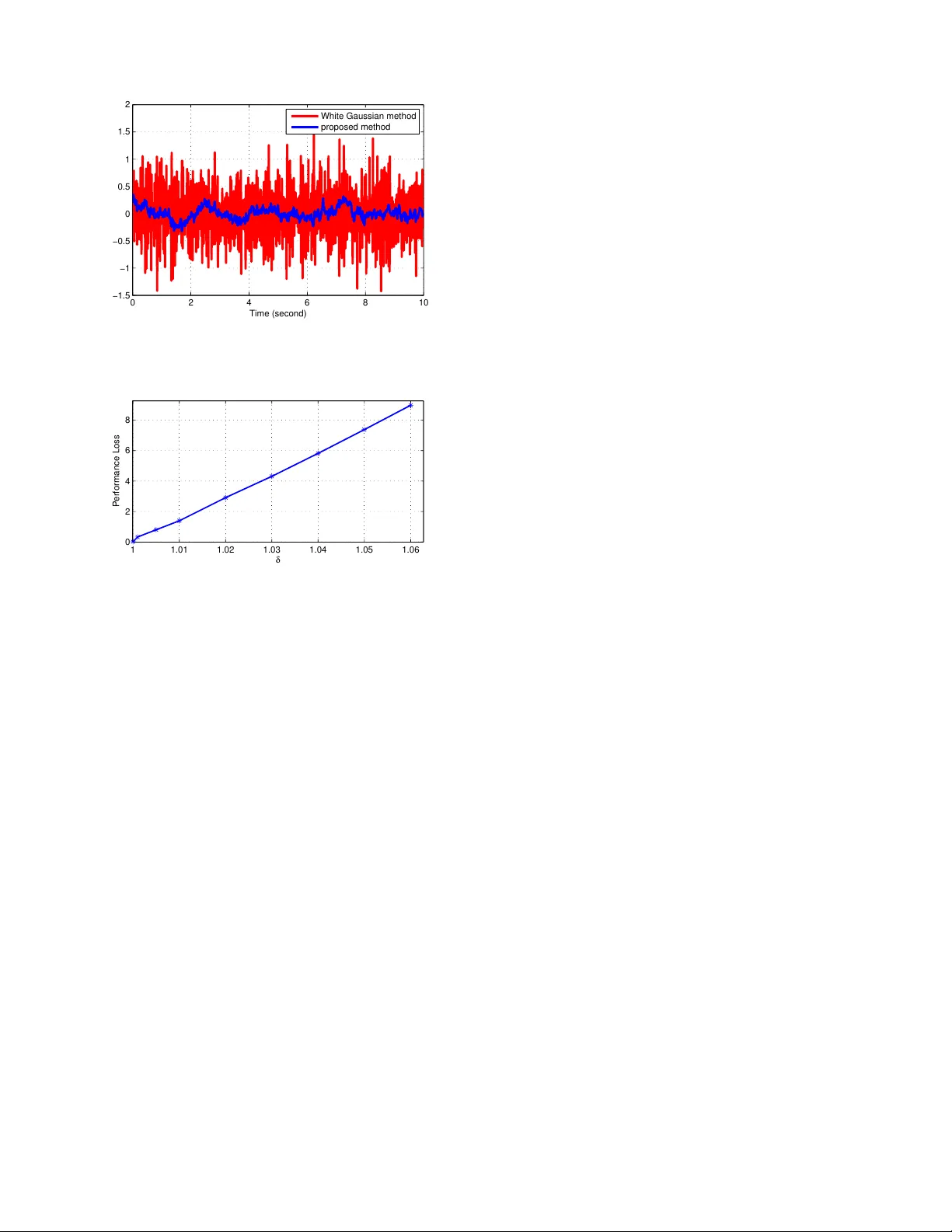
시뮬레이션에서는 2차 시스템을 대상으로, 제안 방법과 기존의 화이트 노이즈 워터마킹(정적 i.i.d. 가우시안) 방식을 비교한다. 동일한 탐지 시간·알람 수 목표(예: τ=50, β=5) 하에서, 제안 방법은 ξ(t) 의 평균 파워가 약 30% 낮으며, 알람이 더 집중적으로 발생해 탐지 시간이 평균 0.8τ 로 단축된다. 또한, 탐지 파라미터를 변화시켜 탐지율을 0.9에서 0.99까지 조정했을 때, 성능 손실은 선형적으로 증가하지만, 최적화된 설계에서는 손실을 최소화할 수 있음을 확인한다.
결론적으로, 이 논문은 (1) 재생 공격 시 기존 잔차 기반 탐지가 실패하는 원인을 이론적으로 분석하고, (2) 동적 공격 탐지 신호를 이용해 시스템 고유 동역학을 활용해 잔차를 인위적으로 불안정하게 만들어 탐지를 가능하게 하며, (3) 탐지율과 제어 성능 사이의 트레이드오프를 정량적으로 관리할 수 있는 최적화 프레임워크를 제공한다는 점에서 기존 연구에 비해 큰 진보를 이룬다. 향후 연구에서는 비선형 시스템, 다중 에이전트 환경, 그리고 공격자가 탐지 신호를 추정하려는 경우에 대한 견고성 분석이 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기