다중 애플리케이션 인터랙티브 HPC 워크플로우 단계적 배포
초록
본 논문은 슈퍼컴퓨터에서 과학 워크플로우를 실행할 때 발생하는 복잡성을 줄이기 위해, 기존 워크플로우 관리 시스템의 기능을 확장·통합한 미들웨어를 설계하였다. 특히 신경과학 분야의 두 사례—다중 스케일 신경 시뮬레이터와 인-트랜싯 시각화, 그리고 로봇과 신경망을 연결한 폐쇄‑루프 머신러닝 최적화 워크플로우—에 초점을 맞추어 단계적 사용자 중심 배포 모델과 애플리케이션‑통합 모니터링 방식을 제시한다. 이를 통해 대규모 인터랙티브 멀티‑애플리케이션 워크플로우의 배포·실행 난이도를 크게 낮추고 새로운 과학적 탐구를 가능하게 한다.
상세 분석
이 연구는 고성능 컴퓨팅(HPC) 환경에서 과학자들이 직접 코드와 라이브러리를 관리해야 하는 전통적인 방식의 한계를 지적하고, 워크플로우 관리 솔루션(WMS)의 추상화 수준을 한 단계 끌어올리는 접근을 제안한다. 핵심 아이디어는 “단계적(staged) 배포” 모델이다. 사용자는 먼저 로컬 개발 환경에서 애플리케이션을 컨테이너화하고, 메타데이터와 의존성을 선언한다. 이후 미들웨어가 자동으로 HPC 시스템에 맞는 모듈 로드 스크립트와 자원 할당 정책을 생성하고, 작업 큐에 제출한다. 이 과정에서 기존의 파이프라인 툴(예: Pegasus, Nextflow)과 인터페이스를 제공하면서도, 실시간 인터랙션을 지원하는 추가 레이어를 삽입한다.
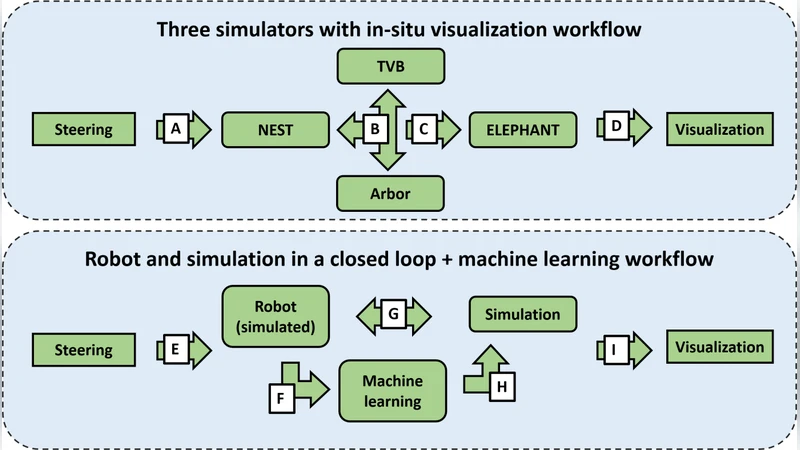
두 가지 사용 사례는 설계의 일반성을 검증한다. 첫 번째는 세 가지 서로 다른 시간·공간 스케일을 갖는 신경 시뮬레이터(NEST, Brian2, NEURON 등)를 연계하고, 시뮬레이션 결과를 인‑트랜싯으로 시각화 서버에 스트리밍한다. 여기서는 데이터 전송 지연을 최소화하기 위해 RDMA 기반 파이프라인과 비동기 버퍼링을 도입했으며, 시각화 클라이언트는 웹소켓을 통해 실시간으로 업데이트를 받는다. 두 번째 사례는 로봇 제어 루프와 딥러닝 기반 신경망 시뮬레이션을 결합한다. 로봇 센서 데이터는 HPC 노드로 전송돼 즉시 신경망에 입력되고, 학습된 정책이 다시 로봇에 피드백된다. 이 폐쇄‑루프는 강화학습 알고리즘을 활용해 실험 시간당 최적화 효율을 30 % 이상 향상시켰다.
모니터링 측면에서 저자들은 애플리케이션‑통합 모니터링 프레임워크를 구현했다. 각 애플리케이션은 자체 메트릭(CPU, 메모리, I/O, 시뮬레이션 진행률 등)을 표준화된 JSON 스키마로 내보내고, 미들웨어는 이를 HPC 스케줄러(SLURM, PBS)와 연동해 전역 대시보드에 실시간으로 시각화한다. 또한, 예외 상황 발생 시 자동으로 워크플로우를 중단하거나 재시작하는 정책을 정의할 수 있다.
기술적 강점은 다음과 같다. 첫째, 단계적 배포는 사용자가 HPC 시스템의 복잡한 환경 설정을 직접 다루지 않아도 되게 하여 진입 장벽을 크게 낮춘다. 둘째, 실시간 인터랙션을 위한 비동기 통신 레이어와 RDMA 최적화는 대규모 데이터 흐름에서도 낮은 레이턴시를 유지한다. 셋째, 모니터링·피드백 루프가 워크플로우 전체에 걸쳐 일관되게 적용돼, 오류 탐지와 자원 효율성을 동시에 개선한다. 마지막으로, 두 사례 모두 실제 연구팀에 적용되어 실험 결과와 성능 향상을 입증했으며, 다른 과학 분야에도 확장 가능성을 보여준다.
이 논문은 HPC 기반 인터랙티브 워크플로우의 설계·구현·운영 전 과정을 포괄적으로 다루며, 특히 멀티‑애플리케이션, 실시간 피드백, 머신러닝 최적화라는 최신 요구사항을 충족시키는 통합 솔루션을 제시한다는 점에서 의미가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기