시간 가변 지연이 있는 트리 네트워크 스웜 원격조작의 연결 유지 전략
초록
본 논문은 인간 조작자의 예측 불가능한 입력과 통신 지연이 동시에 존재하는 트리 형태의 로봇 스웜에서, 내부 결합 강도와 감쇠를 동적으로 조절하는 제어법을 제시한다. 라플라스 기반 집합 불변성 분석을 통해 초기 트리 연결성을 유지함을 증명하고, 시간 가변 지연에 대해서는 강화된 이득 선택과 라플라스‑크라소보스키 함수를 이용해 ISS(입력‑상태 안정성)를 확보한다. 실험 결과는 제안 제어가 지연 상황에서도 연결 유지와 동기화를 달성함을 보여준다.
상세 분석
이 연구는 두 가지 핵심 위협—인간 조작자의 비정형 입력과 로봇 간 통신 지연—이 동시에 발생할 때 스웜의 연결성을 보장하는 새로운 제어 프레임워크를 제시한다. 먼저, 스웜을 Euler‑Lagrange(EL) 2차 시스템으로 모델링하고, 모든 로봇이 동일한 통신 반경 r을 갖는 무방향 트리 그래프 G(t) 위에 배치한다. 초기 조건으로 트리 구조와 각 링크가 r‑ε 이내에 있음을 가정함으로써, 기존 연구에서 사용된 “스팬 트리 유지” 가정과 일치시킨다.
제어 설계는 두 단계로 구성된다. (1) 지연이 없는 경우, 로봇 간 거리 기반 맞춤형 퍼텐셜 V(·)을 정의하고, 이 퍼텐셜의 그래디언트에 비례하는 결합력과 상태‑의존적 감쇠를 적용한다. 라플라스 행렬 L과 incidence matrix D를 이용해 V의 시간 미분을 라플라스‑Krasovskii 형태로 전개하고, 라플라스 기반 집합 불변성(SET INVARIANCE) 분석을 통해 V가 사전에 정의된 안전 영역을 초과하지 않음을 보인다. 이때 제어 이득은 로봇 간 거리와 현재 퍼텐셜 값에 따라 실시간으로 업데이트되며, 인간 입력 f는 퍼텐셜 증가를 제한하는 형태로만 스웜에 전달된다.
(2) 시간 가변 지연 τij(t) ≤ τmax이 존재할 경우, 기존 제어에 두 가지 보강을 추가한다. 첫째, 거리 제약을 더 엄격히 설정하여 k·xij· < r‑δ 로 제한하고, δ는 지연에 의해 발생할 수 있는 최대 위치 오차를 보상한다. 둘째, 라플라스‑Krasovskii 함수 V̂를 도입해 지연에 의한 상태‑지연 함수 φt를 포함시킨다. V̂의 미분을 평가할 때, 지연에 의한 교차항을 상한화하고, 이를 억제하기 위한 최소 감쇠 계수와 결합 이득의 하한을 도출한다. 이러한 조건을 만족하면, 전체 시스템은 입력‑상태 안정성(ISS) 특성을 갖게 되며, 인간 입력이 유한한 경우 상태는 KL‑함수에 의해 수렴한다.
이론적 결과는 두 개의 정리로 정리된다. 정리 1은 지연‑프리 스웜에서 제안 제어가 초기 트리 연결성을 영구히 유지함을 보이며, 정리 2는 위의 보강 조건 하에 시간 가변 지연이 존재해도 동일한 연결 유지와 ISS를 보장한다. 또한, 제어 이득을 계산하는 알고리즘을 제시해 실제 구현 가능성을 검증한다.
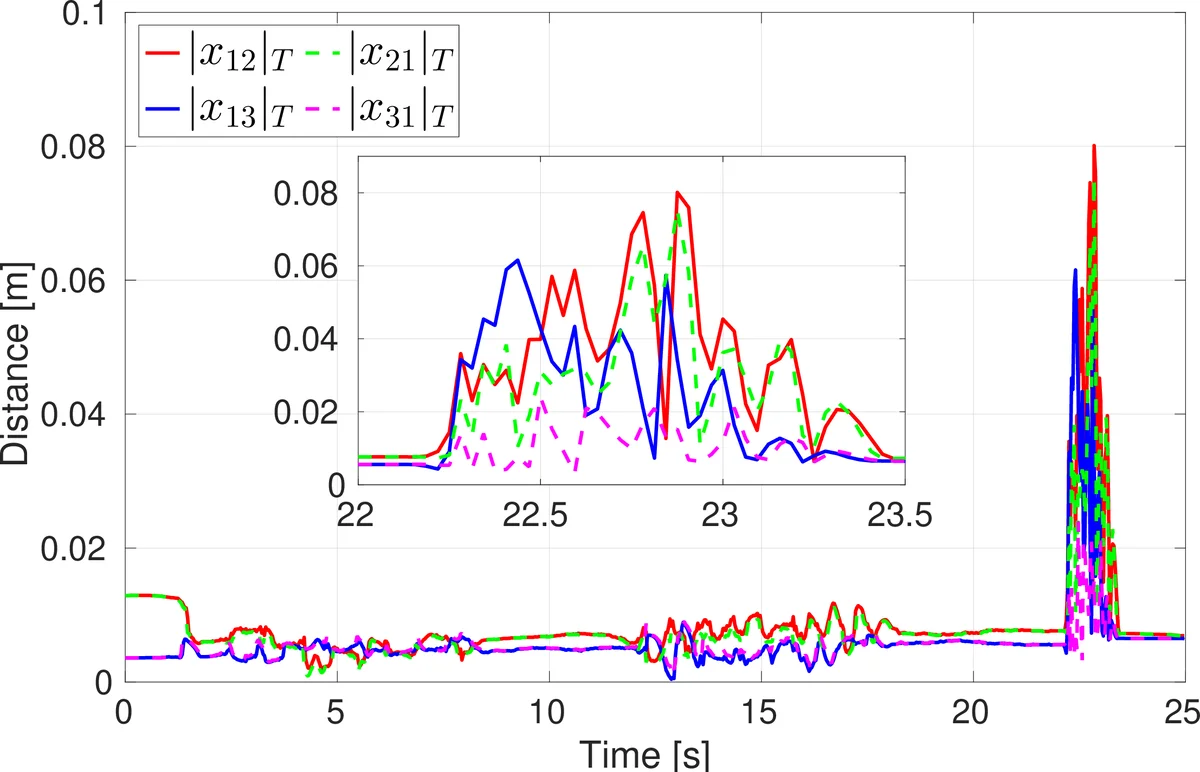
실험에서는 6대의 지상 로봇을 트리 형태로 배치하고, 마스터 조작기를 통해 비정형 속도 명령을 전달하였다. 지연을 인위적으로 0~200 ms 범위로 변동시키면서, 제안 제어와 기존 방법(
댓글 및 학술 토론
Loading comments...
의견 남기기