저비용 RGBD 센서를 활용한 3D 포장면 재구성 및 결함 탐지
본 논문은 저렴한 마이크로소프트 Kinect 센서를 이용해 도로 포장면의 3D 모델을 구축하고, 파손·포트홀 등 결함을 정량적으로 측정하는 방법을 제시한다. 센서 배열을 장착한 카트를 설계·제작하고, SVD 기반 경사 보정, SURF‑MSAC 매칭을 통한 RGB‑Depth 이미지 스티칭을 수행한다. 현장 실험을 통해 깊이·폭·길이 측정 오차가 3~7% 수준임을 확인하였다.
저자: Ahmadreza Mahmoudzadeh, Sayna Firoozi Yeganeh, Amir Golroo
본 논문은 도로 포장 관리에서 핵심적인 데이터 수집 과정을 저비용으로 구현하기 위해 마이크로소프트 Kinect V2 RGB‑D 센서를 활용한 시스템을 제안한다. 기존 레이저 스캐너는 높은 정확도를 제공하지만 장비 비용·운용·유지보수 비용이 높아 개발도상국의 지방자치단체에서는 적용이 어려운 실정이다. 이를 해결하고자 저자들은 다중 Kinect 센서를 장착한 이동식 카트를 설계·제작하였다. 카트는 차선 전체 폭(3.65 m)을 커버하도록 배열되었으며, 정적·동적 두 모드에서 데이터 수집이 가능하도록 설계되었다.
수집된 데이터는 색상(RGB) 이미지와 깊이(Depth) 이미지 쌍으로 구성된다. 먼저, 각 센서에 대해 내부·외부 캘리브레이션을 수행해 색상과 깊이 좌표계 간의 변환 행렬을 구한다. 이후 전처리 단계에서는 관심 영역(ROI)을 선택하고, 가우시안 필터를 적용해 잡음을 감소시킨다. 깊이 프레임은 포장면과 평행하지 않은 경우가 많아, Singular Value Decomposition(SVD) 기반 평면 추정으로 기울기를 보정한다. SVD는 전체 포인트 클라우드의 평균 평면을 최소 자승법으로 계산해, 기울기 행렬을 도출하고 이를 깊이 데이터에 적용한다.
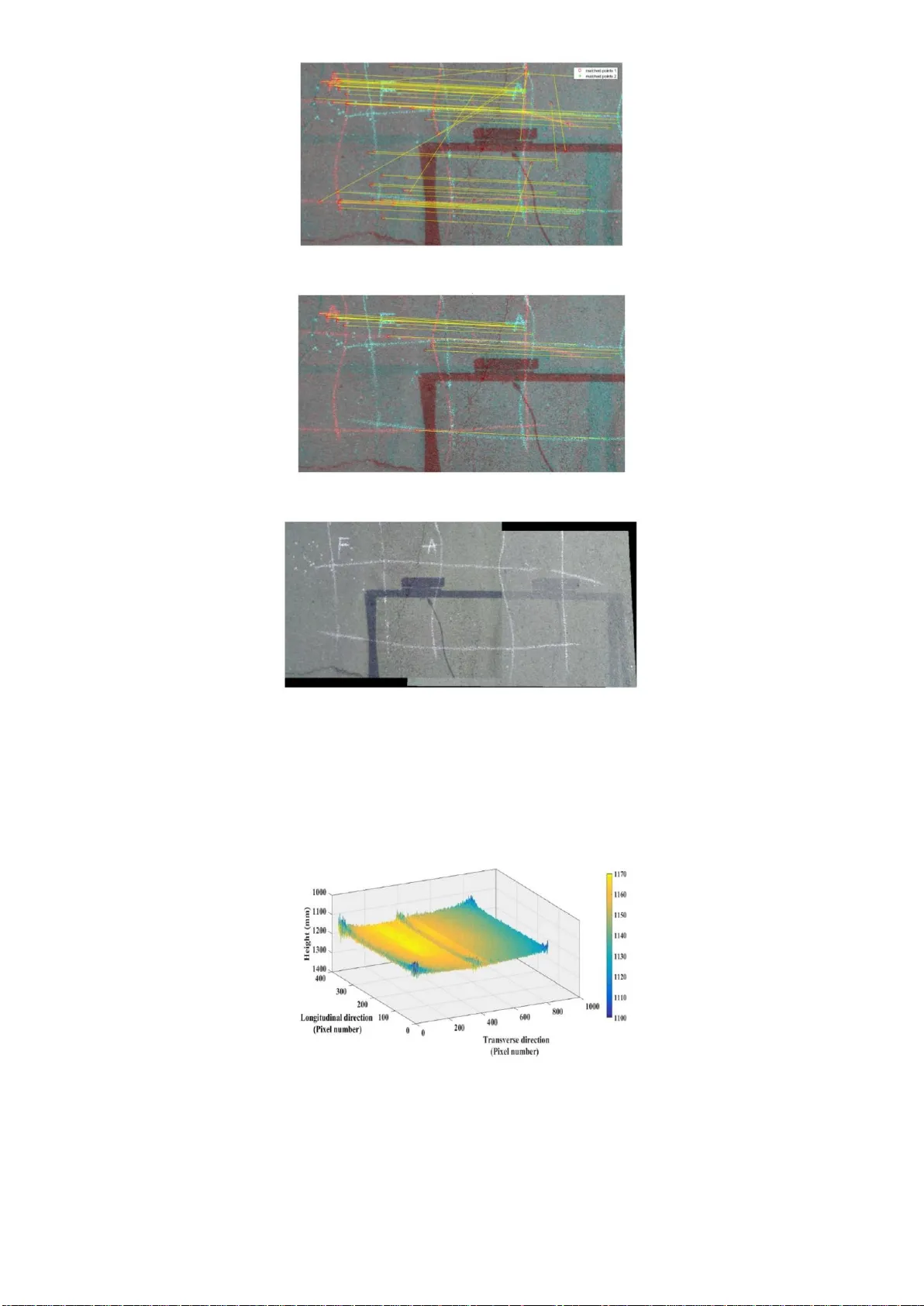
보정된 깊이와 RGB 이미지의 정합을 위해 두 단계 매칭 절차를 적용한다. 첫 단계에서는 Speeded‑up Robust Features(SURF) 알고리즘을 이용해 각 이미지 쌍에서 특징점을 추출하고 매칭한다. SURF는 회전·스케일 불변성을 제공해 다양한 촬영 조건에서도 안정적인 매칭을 가능하게 한다. 두 번째 단계에서는 M‑Estimator Sample Consensus(MSAC)를 사용해 매칭된 특징점 중 외란(outlier)을 제거한다. MSAC는 RANSAC의 변형으로, 잔차 기반 가중치를 부여해 더 높은 견고성을 제공한다. 이렇게 도출된 변환 행렬을 이용해 RGB와 깊이 이미지가 정확히 겹쳐지며, 전체 포장면에 대한 연속적인 3D 포인트 클라우드가 생성된다.
생성된 3D 모델을 활용해 횡단면 프로파일을 추출하고, 포트홀·러팅 등 결함의 깊이·폭·길이 등을 정량화한다. 현장 실험에서는 평탄한 아스팔트 표면에 대해 레이저 거리계와 비교했을 때 평균 상대 오차가 깊이 3.93 %, 폭 2.30 %, 길이 7.22 %로 나타났다. 또한, 인공적으로 만든 결함에 대해 측정값과 실제 치수의 차이가 위와 유사한 수준임을 확인하였다. 이러한 결과는 Kinect 기반 시스템이 레이저 스캐너에 비해 정확도는 다소 낮지만, 비용·운용 효율성을 고려하면 실용적인 대안이 될 수 있음을 시사한다.
논문의 한계점으로는 Kinect V2의 깊이 측정 범위(0.5 ~ 4.5 m)와 조명 조건에 민감한 특성, 다중 센서 간 동기화 오차 등이 있다. 향후 연구에서는 고정밀 IMU와 GNSS를 결합해 전역 좌표계 정합을 강화하고, 딥러닝 기반 결함 분류 및 자동화된 품질 평가 모듈을 추가함으로써 시스템의 정확도와 활용성을 높일 수 있다. 전반적으로 이 연구는 저비용 RGB‑D 센서를 활용한 포장면 3D 재구성 및 결함 탐지 방법을 제시함으로써, 개발도상국에서도 현실적인 포장 관리 시스템을 구축할 수 있는 기반을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기