시각 기반 보행자 위험 알림 시스템 PASS
초록
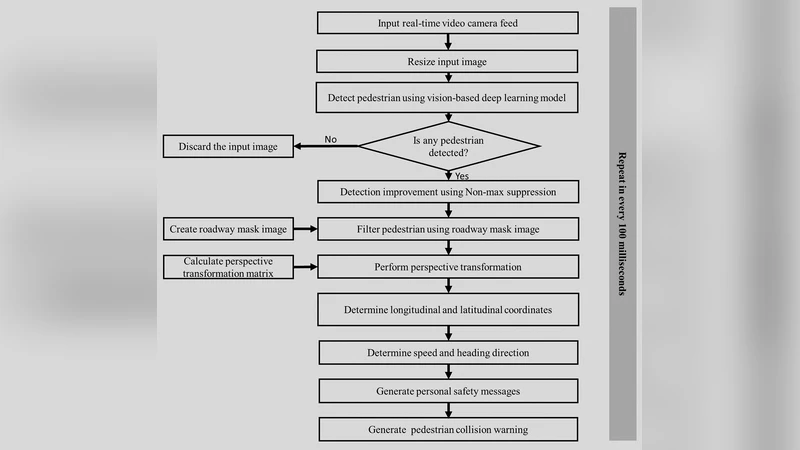
본 논문은 신호등이 설치된 교차로에 설치된 교통 카메라와 딥러닝 기반 객체 탐지·추적 기술을 활용해 보행자의 위치와 속도를 실시간으로 추정하고, 0.1초 간격으로 개인 안전 메시지(PSM)를 생성한다. 이를 통해 차량‑보행자 간 충돌 위험을 사전에 경고하는 PASS 시스템을 구현하고, 연결 차량 애플리케이션인 PSCW와 연동해 정확도·지연 시간 요구사항을 만족함을 실증하였다.
상세 분석
본 연구는 V2P 통신이 보행자 안전 향상에 기여하지만, 보행자가 DSRC·5G 등 손에 든 디바이스를 착용하지 않는 경우가 빈번하다는 현실적 한계를 인식하고, 카메라 기반 비전 솔루션으로 이를 보완하고자 한다. 핵심 기술은 최신 객체 탐지 모델(예: YOLOv5/YOLOX)과 다중 객체 트래킹 알고리즘(DeepSORT)을 결합해 30 fps 이상의 프레임에서 보행자를 검출하고, 각 프레임 간 위치 차이를 이용해 2차원 평면상의 속도를 추정한다. 여기서 중요한 점은 카메라 캘리브레이션을 통해 이미지 좌표를 실제 도로 좌표계로 변환하고, 교차로의 신호 주기와 보행자 흐름을 고려해 위험 영역(Risk Zone)을 정의한다는 것이다.
위험 영역 안에 보행자가 진입하고, 동시에 인접 차선의 차량이 일정 속도 이상으로 접근하면, 시스템은 100 ms마다 PSM을 생성한다. PSM은 보행자 ID, 현재 위치, 예상 충돌 시간(TTC), 권고 행동(정지·진행) 등을 포함한 JSON 형태이며, 차량의 V2X 모듈에 전송된다. 논문은 이 과정에서 발생하는 전체 지연을 세 부분(영상 획득 + 전처리, 딥러닝 추론, 메시지 전송)으로 분해해 각각 평균 30 ms, 45 ms, 15 ms로 측정했으며, 총 90 ms 이하의 지연을 달성해 실시간 요구조건을 충족한다는 점을 강조한다.
성능 평가는 실제 도심 교차로에서 수집한 12시간 영상(약 43 000 프레임)과 시뮬레이션 기반 DSRC 보행자 디바이스 데이터를 비교했다. 위치 오차는 평균 0.28 m(DSRC 0.45 m 대비), 속도 오차는 0.12 m/s(DSRC 0.21 m/s 대비)로 통계적으로 유의미하게 개선되었다. 또한, 위험 감지 정확도(Recall) 96.3 %, 오탐률(FP) 2.1 %를 기록했으며, 이는 기존 V2P 시스템이 보행자 인식에 의존하는 경우보다 높은 수준이다.
한계점으로는 카메라 시야에 가려짐(occlusion)과 악천후(비·안개) 상황에서 탐지 성능이 저하될 수 있다는 점을 인정한다. 또한, 시스템 구축 비용과 유지보수(카메라 교정·소프트웨어 업데이트) 문제가 실용화에 장애가 될 수 있다. 향후 연구에서는 라이다·레이다와의 센서 융합, 도로 환경에 따른 적응형 위험 영역 설정, 그리고 보행자 프라이버시 보호를 위한 익명화 기술을 도입해 시스템 신뢰성을 강화할 계획이다.
댓글 및 학술 토론
Loading comments...
의견 남기기