각도 측정 기반 협동 위치추정과 사후 선형화 Belief Propagation
본 논문은 차량 간 각도‑오브‑도착(AoA) 측정만을 이용해 위치와 방위각을 동시에 추정하는 협동 위치추정 알고리즘을 제안한다. 비선형 AoA 모델을 사후 확률에 기반한 선형 회귀(SLR)로 선형화한 뒤, 가우시안 형태의 메시지를 교환하는 Posterior Linearization Belief Propagation(PLBP)을 반복 수행한다. 시뮬레이션에서 제안 기법은 몇 차례의 반복만으로 위치 RMSE를 수 미터 수준, 방위각 RMSE를 0.…
저자: Yibo Wu, Bile Peng, Henk Wymeersch
본 논문은 차량 간 협동 위치추정(cooperative localization) 문제를 각도‑오브‑도착(AoA) 측정만을 이용해 해결하는 새로운 알고리즘을 제안한다. 기존의 거리 기반 TOA/TDOA 방식은 정확한 동기화가 필요하고, 차량의 방위 정보를 제공하지 못한다는 한계가 있다. 반면, AoA는 안테나 어레이만 있으면 쉽게 얻을 수 있으며, 차량의 방위각 정보를 직접 활용할 수 있다. 그러나 AoA와 차량 상태(2차원 위치와 방위각) 사이의 관계는 atan2 함수에 의해 비선형으로 표현되므로, 베이지안 추론을 위한 Belief Propagation(BP)에서 메시지를 정확히 계산하기 어렵다.
이를 해결하기 위해 저자들은 Posterior Linearization Belief Propagation(PLBP)이라는 프레임워크를 적용한다. 먼저 각 차량 i는 Gaussian 사전 p_i(x_i)=𝒩(μ_i,P_i)로 표현되며, 차량 간의 AoA 측정은
z_{ij}=h_{ij}(x_i,x_j)+η_{ij}, η_{ij}∼𝒩(0,R_{ij})
형태이다. 여기서 h_{ij}(·)는 atan2를 포함하는 비선형 함수이다. PLBP는 현재 사후 공동 분포 b^{(k)}(x_i,x_j)를 이용해 선형 회귀(SLR)를 수행함으로써 h_{ij}를
h_{ij}(x_{ij})≈C_{ij}·\tilde{x}_{ij}+e_{ij}, e_{ij}∼𝒩(0,Ω_{ij})
와 같이 선형화한다. C_{ij}와 Ω_{ij}는 사후 평균에 대한 최소 평균제곱오차 조건을 만족하도록 계산된다. 선형화된 모델은 Gaussian 노이즈를 갖게 되므로, BP의 메시지 전달식(통합·곱셈)이 모두 가우시안 형태로 닫힌 해를 갖는다.
알고리즘은 K번의 선형화 단계와 각 단계마다 M번의 BP 반복을 수행한다. 구체적인 흐름은 다음과 같다. (1) 초기 사전 b^{(0)}(x_i)=p_i(x_i)와 메시지 m^{(0)}_{i→j}=1을 설정한다. (2) 현재 사후 b^{(k-1)}(x_i,x_j)로부터 모든 (i,j)∈E에 대해 C_{ij},Ω_{ij}를 구한다. (3) 선형화된 측정 모델을 이용해 M번의 Gaussian BP를 수행한다. (4) 업데이트된 공동 사후 b^{(k)}(x_i,x_j)를 얻고, 다음 선형화 단계로 넘어간다. 최종적으로 각 차량의 마진 사후 p_i(x_i|z)≈b^{(K)}_i(x_i)를 반환한다.
복잡도는 O(K·M·\bar N·D³)이며, 여기서 \bar N은 평균 이웃 수, D=3은 상태 차원이다. 실험에서는 K=10, M=3 정도면 충분히 수렴함을 확인했다.
시뮬레이션 환경은 뉴욕 맨해튼의 실제 도로 지도 위에 51대 차량을 배치한 시나리오이다. 통신 반경 r=30 m, 안테나 시야각 φ=π, 측정 노이즈 표준편차 √R≈18°(≈0.31 rad) 등으로 설정하였다. 6대는 매우 작은 사전 공분산(σ≈0.1 m, 0.01 rad)을 가진 앵커(또는 RSU)로 지정하고, 나머지는 다양한 사전 불확실성을 갖는다.
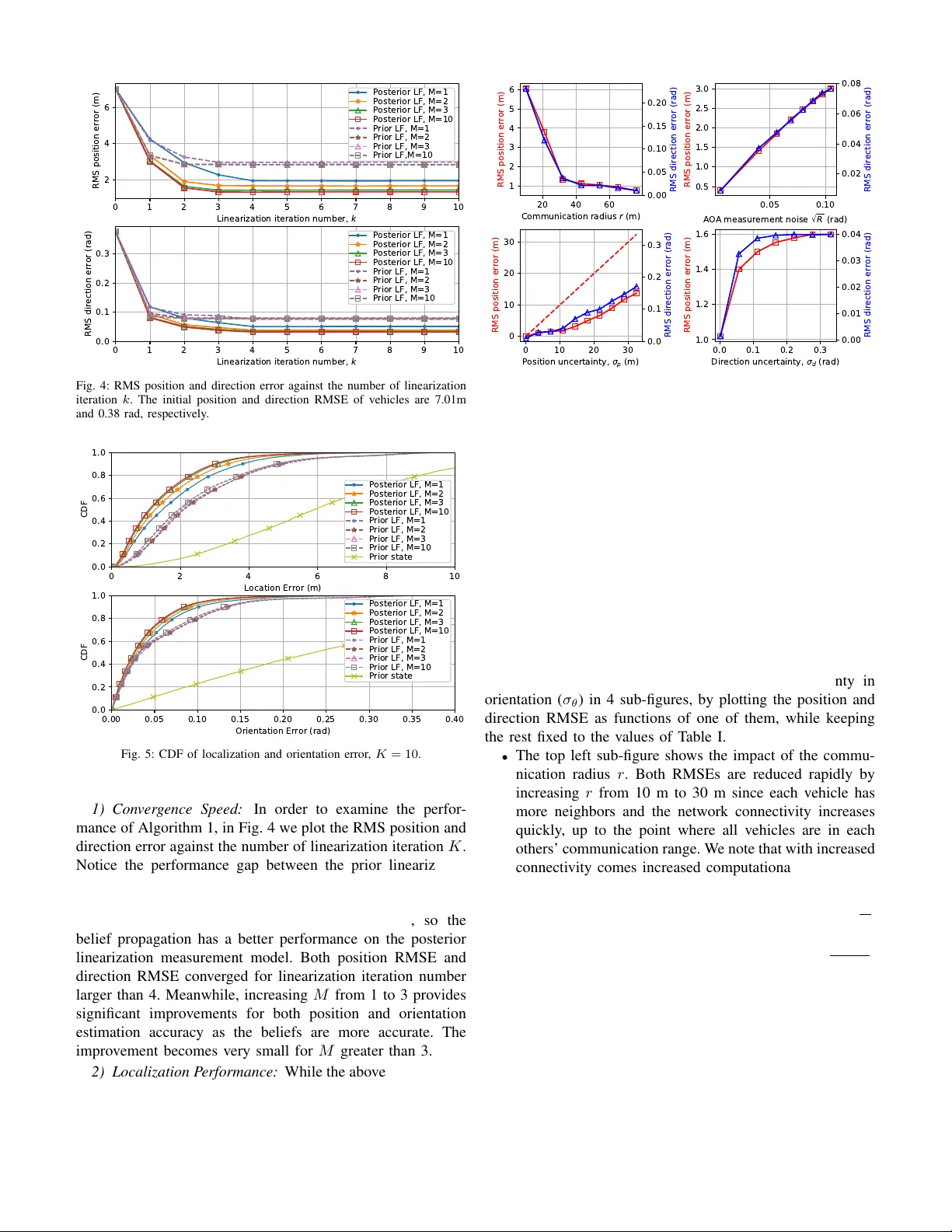
주요 결과는 다음과 같다. (i) 초기 위치 RMSE는 7 m, 방위 RMSE는 0.38 rad였으나, PLBP를 4회 이상 반복하면 위치 RMSE가 2 m 이하, 방위 RMSE가 0.15 rad 이하로 급격히 감소한다. (ii) 사후 선형화 모델이 사전 선형화 모델보다 더 정확한 근사와 작은 불확실성을 제공함을 보여, 동일한 BP 반복 횟수에서도 사후 모델이 월등히 좋은 성능을 보인다. (iii) BP 반복 횟수 M을 1→3으로 늘리면 성능이 크게 향상되지만, M>3에서는 수익이 미미해 실시간 적용에 적합한 M=3을 권장한다. (iv) 통신 반경 r을 10 m에서 30 m로 확대하면 이웃 수가 급증해 네트워크 연결성이 높아지고, 위치·방위 RMSE가 크게 감소한다. (v) AoA 측정 노이즈 R이 커질수록 RMSE가 √R에 비례해 선형적으로 악화되며, 고정밀 안테나와 신호 처리 기술이 필요함을 시사한다. (vi) 사전 위치 불확실성 σ_p가 0–10 m 범위에서는 최종 RMSE에 큰 영향을 주지 않지만, 10 m를 초과하면 오차가 점진적으로 증가한다. (vii) 사전 방위 불확실성 σ_θ가 증가하면 AoA 측정의 활용도가 급격히 감소해 RMSE가 크게 늘어난다.
이러한 분석을 통해 PLBP 기반 AoA‑only 협동 위치추정이 거리 기반 방법보다 사전 정보에 덜 의존하고, 적은 통신·연산 자원으로도 높은 정확도를 달성함을 확인하였다. 다만, 각 차량에 양쪽 안테나 어레이가 필요하고, FoV 내에 충분한 이웃이 존재해야 한다는 전제조건이 있다. 향후 연구에서는 3차원 환경, 다중 경로 및 비선형 안테나 배열 효과, 그리고 실시간 구현을 위한 하드웨어 최적화 등을 다룰 수 있을 것이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기