라이다 객체 분류를 위한 명시적 폐색 모델링
본 논문은 라이다 포인트 클라우드에서 폐색을 내재된 속성으로 모델링하고, 이를 이용해 PointNet 기반 분류기의 입력에 폐색 플래그를 추가함으로써 객체 분류 정확도를 크게 향상시킨다. KITTI 데이터셋 실험에서 전체 정확도와 클래스별 평균 정확도가 현저히 개선된 것을 확인하였다.
저자: Xiaoxiang Zhang, Hao Fu, Bin Dai
본 논문은 무인 지상 차량(UGV)에서 라이다(LIDAR)를 활용한 객체 검출·분류 시 발생하는 ‘상호 폐색’ 문제를 해결하기 위해, 폐색을 라이다 포인트 클라우드의 내재된 속성으로 모델링하고 이를 분류 단계에 반영하는 새로운 프레임워크를 제안한다.
1. 서론에서는 라이다가 제공하는 정밀 거리 측정의 장점에도 불구하고, 포인트 클라우드의 희소성 및 인접 객체 간 폐색으로 인해 객체 형태가 불완전하게 관측되는 문제를 지적한다. 특히 폐색으로 인해 학습 단계에서는 다양한 형태의 불완전 샘플이 섞여 들어가고, 테스트 단계에서는 동일 클래스 내에서도 큰 형태 변이가 발생해 분류 정확도가 저하된다는 점을 강조한다.
2. 관련 연구에서는 기존의 포인트 기반 객체 검출·분류 방법(Petrovska et al., Himmelsbach et al., MV3D, VoxelNet 등)과 이미지 기반 폐색 마스크 예측 방법들을 살펴보며, 라이다 자체에서 폐색을 직접 모델링한 연구는 거의 없음을 밝힌다.
3. 제안 방법은 크게 네 부분으로 구성된다.
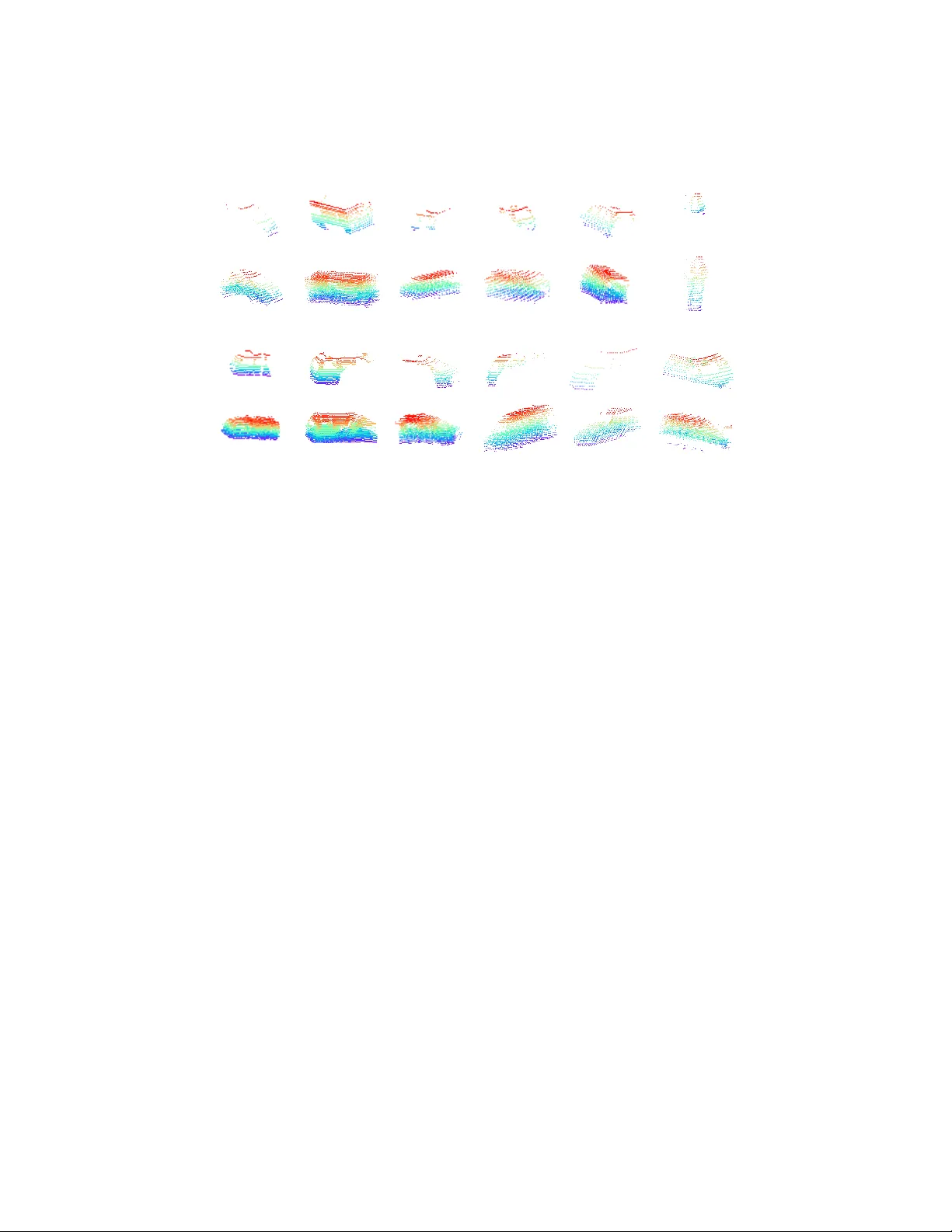
- **포인트 클라우드 정의**: 객체 내부 포인트(P_raw)와 객체 외부(장애물) 포인트(P_ob)를 구분하고, 장애물에 의해 라이다 광선이 차단되는 영역을 폐색 포인트(P_oc)로 정의한다.
- **폐색 영역 모델링**: 라이다 위치를 원점 O라 두고, 각 장애물 포인트와 객체 포인트에 대해 ray‑casting을 수행한다. 일정 스텝(s)만큼 광선을 연장해 지면 이하가 될 때까지 폐색 포인트를 생성한다. 생성된 폐색 포인트는 원본 포인트와 구분하기 위해 4번째 차원 ‘occluded’를 추가하고, 원본은 0, 새로 만든 폐색 포인트는 1로 표기한다.
- **딥러닝 기반 분류**: 기존 PointNet 구조를 그대로 사용하되, 입력 차원을 3→4로 확장하고, T‑Net이 학습하는 변환 행렬을 4×4로 변경한다. 이후 MLP 레이어의 첫 컨볼루션 커널을 1×4로 조정해 4차원 데이터를 처리한다. 이러한 최소한의 구조 변경으로 폐색 플래그를 네트워크가 직접 학습하도록 한다.
- **폐색 모델링 적용**: 위 과정을 통해 얻어진 4차원 포인트 클라우드를 원본 PointNet에 입력함으로써, 폐색이 포함된 객체와 폐색이 없는 객체를 구분할 수 있게 된다.
4. 실험은 KITTI 데이터셋을 사용한다. 처음에는 7개의 카테고리(‘car’, ‘van’, ‘truck’, ‘pedestrian’, ‘cyclist’, ‘tram’, ‘misc’)에 대해 각각 원본 PointNet과 제안 방법을 학습·평가하였다. 결과는 전체 정확도와 평균 클래스 정확도 모두 크게 향상되었으며, 특히 ‘car’와 ‘van’ 등 유사한 형태의 클래스에서 폐색 정보가 오분류를 크게 감소시켰다. 이후 ‘car’, ‘van’, ‘truck’를 하나의 ‘vehicle’ 클래스로 합친 5카테고리 실험에서도 동일하게 성능이 개선되었다(전체 정확도 0.808, 평균 클래스 정확도 0.962). 혼동 행렬과 시각적 예시를 통해 폐색 포인트가 추가된 경우 원래는 ‘misc’로 잘못 분류되던 샘플이 올바르게 ‘car’로 인식되는 모습을 확인한다.
5. 결론에서는 폐색을 라이다 포인트 클라우드의 intrinsic property로 모델링하고, 이를 사전 처리 단계에서 추가함으로써 기존 포인트 기반 분류기의 성능을 효과적으로 향상시킬 수 있음을 강조한다. 또한 이 방법은 PointNet에 국한되지 않고, 다른 라이다 직접 처리 네트워크에도 적용 가능하다는 점을 제시한다. 향후 연구 방향으로는 보다 정교한 폐색 확률 모델링, 다양한 센서와 환경에 대한 일반화 검증, 그리고 실시간 적용을 위한 연산 최적화 등을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기