마찰 유도 듀핑 진동기의 안정성 탐색을 위한 서러게이트 모델과 적응형 크리깅 전략
** 본 논문은 비선형 마찰력을 갖는 듀핑형 진동기의 파라미터 공간에서 불안정 영역을 효율적으로 탐지하기 위해, 스틱‑슬립 시간과 최대 Lyapunov 지수를 핵심 양으로 삼아 Gaussian Process(kriging) 기반 서러게이트 모델을 구축한다. 특히 분류 목적에 최적화된 적응형 샘플링 기법 MiVor를 적용해 최소의 시뮬레이션 비용으로 불안정성을 예측한다. **
저자: Jan N. Fuhg, Amelie Fau
**
본 논문은 마찰에 의해 유도되는 비선형 진동 시스템, 특히 듀핑형 오실레이터에 엘라스토‑플라스틱 마찰 모델을 결합한 구조를 대상으로, 파라미터 공간 전반에 걸친 불안정 영역을 효율적으로 탐색하기 위한 서러게이트 모델링 기법을 제안한다. 연구는 먼저 시스템의 물리적 모델을 상세히 기술한다. 질량 M 이 이동 벨트 위에 놓이고, 비선형 스프링 K₁X³ + K₂X와 댐퍼 D 가 연결된 구조이며, 외부 하모닉 힘 U₀sin(Ωt)와 정상 하중 N₀ 이 작용한다. 마찰력 F_R 은 동적 엘라스토‑플라스틱 모델을 사용해, 브리슬 변위 z 와 그 속도 ż 를 상태 변수로 도입한다. 이 모델은 스틱 단계에서 플라스틱 변위가 고정되고, 슬립 단계에서 탄성 변위가 고정되는 물리적 메커니즘을 재현한다. 수식 (3)‑(9)에서 제시된 비선형 미분방정식은 수치 적분(Runge‑Kutta 5차)으로 해석된다.
다음으로, 시스템의 동적 거동을 정량화하기 위한 두 가지 핵심 양(Quantity of Interest, QoI)을 선정한다. 첫 번째는 스틱‑시간 비율이다. 이는 상대속도 V_R 가 사전 정의된 임계값(10⁻⁴ m·s⁻¹) 이하인 구간의 누적 시간을 전체 관측 시간(150–250 s)으로 나눈 값으로, 기존 연구에서 마찰‑유도 진동의 내구성을 평가하는 지표로 사용되었다. 그러나 본 연구에서는 스틱‑시간만으로는 안정·불안정 구분이 모호함을 확인하고, 보조적인 지표로 활용한다. 두 번째는 최대 Lyapunov Exponent(LLE)이다. LLE는 초기 조건 근처 궤적의 발산 속도를 나타내며, 양수이면 혼돈(불안정), 비양수이면 정칙(안정)으로 해석된다. 비연속 마찰 모델 때문에 Jacobian을 직접 구하기 어려워, 저자는 작은 교란 Δ 을 도입해 Taylor 1차 전개로 근사 Jacobian을 추정하는 방법을 적용한다(식 12). 이 방식은 기존의 Gram‑Schmidt 기반 LLE 계산이 비연속성에서 발생하는 수치 불안정을 회피한다.
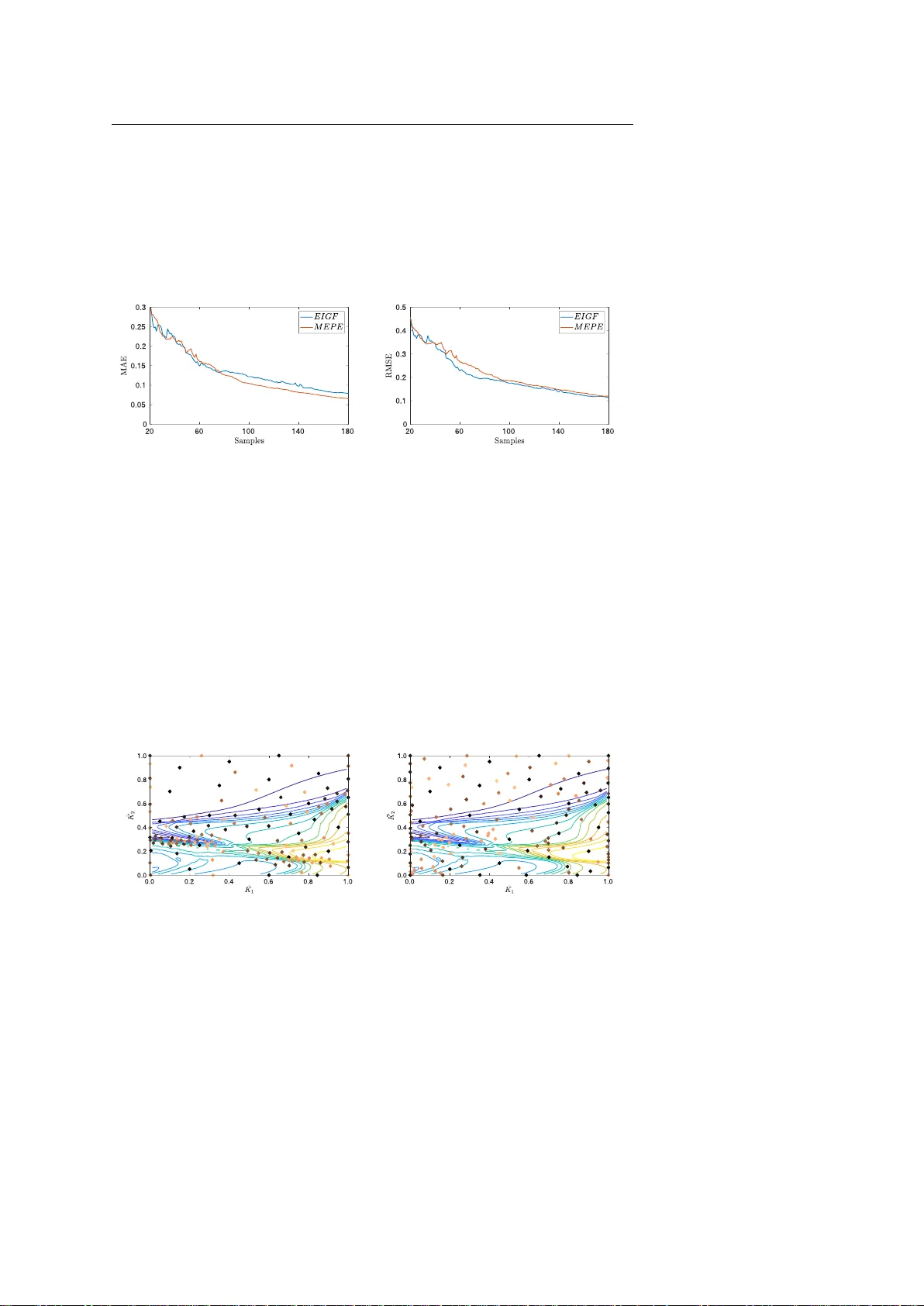
핵심 기법은 Gaussian Process Regression, 즉 kriging을 이용한 서러게이트 모델 구축이다. kriging은 관측된 샘플을 기반으로 전체 파라미터 공간에 대한 확률적 예측(mean)과 불확실성(variance)을 제공한다. 두 가지 목적에 따라 모델을 다르게 설정한다. (i) 회귀 모델: 스틱‑시간을 연속적인 응답면으로 근사, (ii) 분류 모델: LLE의 부호를 기준으로 안정/불안정 클래스를 예측한다. 특히 분류 목적에 최적화된 적응형 샘플링 기법 MiVor(Mean‑Variance‑Optimization‑based‑Voronoi)를 도입한다. MiVor는 현재 kriging 모델의 예측 평균과 분산을 Voronoi 셀에 매핑해, 불확실성이 가장 큰 셀을 선택하고 해당 파라미터 조합에 대한 고정밀 시뮬레이션을 추가한다. 이 과정을 반복함으로써 샘플링 효율을 극대화하고, 불안정 경계가 급격히 변하는 영역을 정밀하게 포착한다.
실험 결과는 두 가지 파라미터 조합을 중심으로 제시된다. 첫 번째는 2차원 파라미터 공간(Ω vs K₁)에서, MiVor가 30~40개의 샘플만으로도 전통적인 격자 샘플링(≈200개) 대비 동일 수준의 경계 정확도를 달성했다. 두 번째는 4차원(Ω, K₁, σ₀, µ_s) 다중 파라미터 공간에서, MiVor가 80개의 샘플로 복잡한 불안정 영역을 재구성했으며, 추가 샘플 없이도 예측 오차가 5% 이하로 유지되었다. 또한, 스틱‑시간만을 사용한 회귀 모델은 불안정 영역을 흐릿하게 나타내는 반면, LLE 기반 분류 모델은 명확한 경계와 높은 정밀도를 제공함을 확인했다.
결론적으로, 본 연구는 (1) 비연속 마찰 시스템에서 LLE를 효율적으로 추정하는 수치 기법, (2) kriging 기반 서러게이트 모델을 이용한 QoI 예측, (3) MiVor 적응형 샘플링을 통한 최소 비용의 파라미터 스케리닝이라는 세 축을 결합해, 복잡한 비선형·비연속 동역학 시스템의 설계 단계에서 빠른 위험 평가와 최적화를 가능하게 한다는 점을 입증한다. 향후 연구에서는 다른 마찰 모델(예: LuGre)이나 다중 자유도 시스템에 대한 확장, 그리고 실험 데이터와의 하이브리드 서러게이트 구축이 제안된다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기