파이프 남은 두께 예측을 위한 가우시안 혼합 마진 모델
본 연구는 시드니 상수도관의 캐스트 아이언 파이프에서 수집한 비파괴 검사 데이터를 활용해, 가우시안 혼합(GM) 마진 분포로 원시 두께값을 정규화하고, 이를 입력으로 하는 가우시안 프로세스(GP) 회귀를 적용해 미측정 구간의 남은 벽두께(RWT)를 고정밀도로 추정한다. GM 모델이 기존 극값 분포보다 K‑S 검정과 AIC 기준에서 우수함을 보였으며, 실제 파이프 구간에 대한 예측 결과가 전체 스캔 데이터와 거의 일치함을 실험적으로 입증하였다.
저자: Linh Nguyen, Jaime Valls Miro, Lei Shi
본 논문은 시드니 상수도관에 설치된 캐스트 아이언(CI) 파이프의 비파괴 검사(R2T2) 데이터를 활용해, 제한된 스캔만으로 전체 파이프의 남은 벽두께(RWT)를 고정밀도로 예측하는 새로운 방법론을 제시한다. 연구 배경으로는 전 세계 도시 상수도관의 약 70 %가 매설 파이프이며, 대부분이 100 년 이상 노후화돼 파열 위험이 증가하고 있다는 점을 들었다. 파이프 파열 시 빠른 복구가 필요하지만, R2T2와 같은 펄스 에디 전류(PEC) 기반 센서는 자기장 침투에 시간이 소요돼 전체 구간을 스캔하는 데 1.5 시간 이상이 걸린다. 따라서 전체 스캔 대신 부분 스캔 후 미측정 구간을 추정하는 기술이 요구된다.
**1. 검사 시스템 및 현장 데이터**
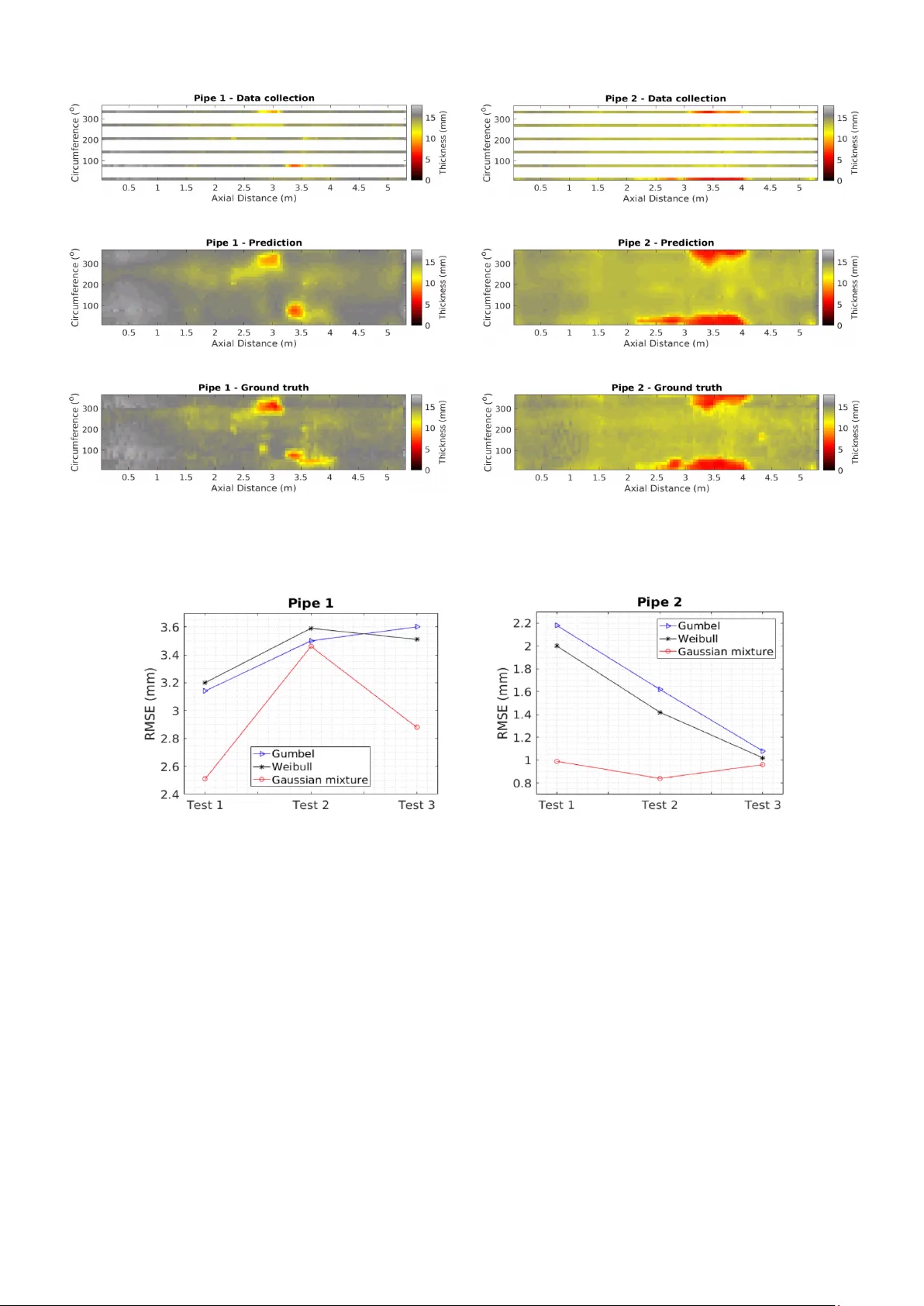
R2T2는 6개의 팔에 각각 50 mm × 50 mm 크기의 PEC 센서를 장착하고, 파이프 직경 350–750 mm에 대응한다. 센서는 150 ms마다 평균 두께값을 반환하며, 50 m 구간을 완전 스캔하는 데 약 2 시간이 소요된다. 연구에서는 2019년 5월 파열된 450 mm 직경 CI 파이프를 대상으로 6번의 왕복 스캔을 수행해 6줄(≈3000개) 데이터를 확보했다. 이 중 가장 손상된 두 스풀(‘Pipe 1’, ‘Pipe 2’)을 선택해 실험에 사용하였다.
**2. 마진 분포 모델링**
원시 RWT 데이터는 긴 꼬리를 가지면서도 낮은 두께 영역에서 중요한 정보를 담고 있다. 기존 연구에서는 최소 두께를 모델링하기 위해 Gumbel·Weibull과 같은 극값 분포를 사용했지만, 본 데이터는 이러한 단일 모드 분포로는 저범위 적합도가 떨어졌다. 저자들은 가우시안 혼합(GM) 마진 분포를 도입해,
\(p(t)=\sum_{i=1}^{N}\gamma_i \mathcal{N}(t|\mu_i,\sigma_i)\)
형태로 모델링하였다. AIC를 이용해 최적 컴포넌트 수를 결정했으며, Pipe 1은 5개, Pipe 2는 6개의 가우시안이 최적으로 선정되었다. K‑S 검정 결과, GM의 통계량은 0.0086·0.0073으로 99 % 신뢰수준 임계값(≈0.03) 이하였으며, Gumbel·Weibull은 각각 0.07~0.18로 기각되었다. AIC 역시 GM이 가장 낮은 값을 기록해 데이터 전체를 가장 잘 설명함을 확인했다.
**3. 가우시안 프로세스 회귀**
정규화된 입력을 사용하기 위해 원시 RWT를 GM의 역 CDF 변환으로 표준 정규분포(z‑score)로 매핑한다. 이후, 위치 \(l=(\theta, z)\) (circumferential, longitudinal)를 4차원 주기형 좌표 \(p=2\pi \operatorname{diag}(\lambda^{-1})l\) 로 변환해, 원통형 파이프의 주기성을 반영한다. 평균은 상수(전체 평균)로 두고, ARD Matern 커널
\(C(p_i,p_j)=\sigma^2\left(1+\sqrt{3}d\right)\exp(-\sqrt{3}d)\)
\(d=\sqrt{\sum_{k=1}^{2}\frac{(p_i^{(k)}-p_j^{(k)})^2}{\eta_k^2}}\)
을 적용한다. 하이퍼파라미터 \(\Theta=(\sigma,\eta_1,\eta_2,\sigma_n)\)는 최대우도법으로 학습된다. 학습된 GP는 미측정 위치 \(p^*\)에 대해 사후 평균 \(m_{p^*}\)와 공분산 \(\Sigma_{p^*}\)를 제공한다.
**4. 예측 파이프라인**
1) 부분 스캔(6줄) 데이터를 GM 역 CDF로 정규화 → \(z\)값 얻음.
2) 정규화된 \(z\)와 위치 \(p\)를 입력으로 GP 학습.
3) 미측정 위치 \(p^*\)에 대해 GP 사후 평균을 계산.
4) GP 출력 \(z^*\)를 GM 정규 CDF를 이용해 실제 두께 \(t^*\)로 역변환.
**5. 실험 결과**
Pipe 1과 Pipe 2에 대해 위 파이프라인을 적용한 결과, 예측된 두께 맵(그림 5c·5d)은 전체 스캔(그림 5e·5f)과 시각적으로 거의 일치하였다. 정량적으로는 최소 두께 차이가 1–2 mm 이내이며, 전체 RMSE는 3.2 mm(Pipe 1)와 3.7 mm(Pipe 2) 수준으로, 현장 요구사항을 충분히 만족한다. 특히, 전체 스캔에 비해 측정 시간은 1.5 시간 → 약 5 분(부분 스캔)으로 감소해, 파열 직후 빠른 진단이 가능해졌다.
**6. 논의 및 향후 과제**
GM 기반 마진 모델은 데이터의 비정규성을 효과적으로 보정하지만, 컴포넌트 수 선택이 데이터 양에 민감하고, 과다한 컴포넌트는 과적합 위험을 초래한다. GP의 O(n³) 복잡도는 대규모 네트워크(수십만 측정점) 적용 시 스파스 GP, 로컬 GP 등 스케일링 기법이 필요하다. 또한, 센서 리프트오프 변동, 온도·습도 등 환경 요인이 측정 노이즈에 미치는 영향을 정량화하고, 다중 센서 융합을 통한 견고성 향상이 요구된다.
**결론**
본 연구는 가우시안 혼합 마진 분포와 가우시안 프로세스를 결합해, 제한된 현장 스캔만으로도 파이프 전체의 남은 벽두께를 높은 정확도로 예측할 수 있음을 입증하였다. 이는 급박한 파이프 파손 상황에서 신속한 비파괴 평가를 가능하게 하며, 수자원 인프라의 예방 정비 전략에 실질적인 변화를 가져올 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기