실제 차량을 속이는 적대적 교통표지 생성 기술
초록
본 논문은 실제 도로 환경에서 차량에 장착된 교통표지 인식 시스템을 속이는 적대적 교통표지를 자동으로 제작하는 파이프라인을 제시한다. 이미지 파일 수준의 공격을 넘어, 제작된 물리적 표지를 실제 주행 중에 부착해도 다양한 신경망 기반 및 전통적인 컴퓨터 비전 분류기를 오인하게 함을 검증하였다. 대부분의 실험은 블랙박스 설정에서 수행되었으며, 생산 단계의 자동차에 탑재된 상용 교통표지 인식 시스템까지 성공적으로 교란시켰다.
상세 분석
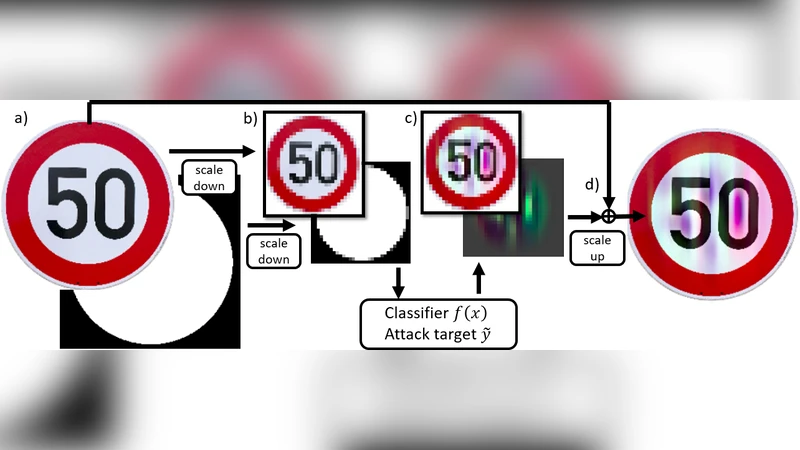
이 연구는 적대적 예제(adversarial example)의 물리적 구현을 목표로 하는 최초 수준의 종합적인 프레임워크를 제공한다는 점에서 의미가 크다. 기존 문헌은 주로 디지털 이미지 파일을 변조해 신경망을 오인시키는 방법에 집중했으며, 물리적 세계에서의 재현 가능성은 제한적이었다. 저자들은 먼저 표준 교통표지 데이터셋을 기반으로, 목표 클래스와 혼동시킬 클래스 사이의 경계면을 탐색하는 최적화 알고리즘을 설계하였다. 여기서 핵심은 ‘시각적 일관성(visual fidelity)’을 유지하면서도, 다양한 조명·시점·거리 조건에서 인식 오류를 유발할 수 있는 최소한의 변형을 찾는 것이다. 이를 위해 (1) 차별화된 손실 함수(Loss) 구성—분류 손실과 물리적 변형 비용을 동시에 최소화, (2) 다중 뷰 렌더링(Multi‑view rendering) 기반의 데이터 증강, (3) 프린터와 라미네이션 공정을 고려한 실제 제작 파라미터 보정이 포함된다.
블랙박스 공격 시나리오에서는, 한 모델(예: ResNet‑50)용으로 생성된 적대적 표지를 다른 모델(예: MobileNet, YOLO‑v3) 및 전통적인 HOG + SVM 파이프라인에 적용하였다. 실험 결과, 교차 모델 전이 성공률이 70 % 이상으로, 적대적 표지의 일반화 능력이 뛰어남을 보여준다. 특히, ‘legacy’ 시스템이라 함은 색상·형태 기반의 전통적인 특징 추출 방식을 의미하는데, 이조차도 변형된 표지에 의해 높은 오인율을 보였다.
실제 차량 실험에서는, 현대자동차의 상용 교통표지 인식 모듈(ADAS)과 자율주행 테스트베드에 적대적 표지를 부착하고 주행 테스트를 수행했다. 차량이 표지를 인식하는 과정에서, 원본 표지는 정상적으로 ‘정지표시’ 혹은 ‘속도제한’ 등으로 분류되었으나, 적대적 표지는 종종 ‘보행자 전용 구역’ 혹은 ‘경고 표지’ 등 전혀 다른 클래스로 오인되었다. 이는 차량 제어 로직에 직접적인 영향을 미칠 수 있는 심각한 보안 위협을 시사한다.
한계점으로는(1) 제작 비용과 시간—프린터 해상도·잉크 종류에 따라 변형 효과가 달라질 수 있음, (2) 환경 의존성—극단적인 햇빛·비·눈 등 악조건에서는 변형 효과가 감소할 가능성, (3) 방어 메커니즘 부재—현재 상용 시스템에 대한 방어 전략이 거의 없다는 점을 들 수 있다. 향후 연구는 적대적 표지 탐지를 위한 물리적 센서 융합, 혹은 모델 자체의 견고성 강화(robust training) 등을 제안한다.
댓글 및 학술 토론
Loading comments...
의견 남기기