시간 가변 상호작용 추정을 위한 앙상블 방법
본 논문은 시간에 따라 변하는 상호작용을 탐지하기 위해 기존의 적응형 Directed Information(ADI) 추정기에 앙상블 학습 기법을 도입한다. 여러 기본 필터를 가중 평균하는 고정‑쉐어(Fixed‑Shares) 알고리즘을 적용해 파라미터 민감성을 감소시키고, 동적 공분산 모델을 이용해 스탠포드 드론 데이터셋의 복잡한 군중 장면에서 유의미한 상호작용을 성공적으로 발견한다.
저자: Br, on Oselio, Amir Sadeghian
본 논문은 시간에 따라 변하는 복잡한 상호작용을 탐지하기 위한 새로운 방법론을 제시한다. 기존의 Directed Information(DI)은 정적(Stationary) 가정하에 정의되어 비정상 데이터에 적용하기 어려웠으며, 이를 보완하기 위해 Adaptive Directed Information(ADI)가 제안되었다. 그러나 ADI는 필터 종류와 파라미터(예: 지수 필터의 α) 선택에 크게 의존해 추정 결과가 불안정해지는 문제가 있었다.
이를 해결하고자 저자들은 앙상블 학습 기법을 도입한다. 기본 아이디어는 여러 개의 ‘기본 필터’ g_i(t,T) 를 준비하고, 각 필터에 데이터에 기반한 가중치 w_i,t 를 부여해 가중 평균(g*)을 만든다. 가중치는 Fixed‑Shares 알고리즘을 변형한 형태로, 손실 함수 e^{-γ(y_i,t−i_t)^2}에 따라 지수적으로 업데이트되며, β 파라미터를 통해 과거 가중치를 일정 비율로 유지한다. 또한, 새로운 필터를 일정 주기 τ마다 추가하는 ‘성장형 앙상블’ 구조를 채택해 급격한 시스템 변화에 빠르게 대응한다.
수학적으로는 DI의 순간 항 I(X_i^{1:t}; X_j^t | X_j^{1:t-1}) 를 추정하고, 이를 g*(t,T) 로 가중합해 ADI를 계산한다. 정리 3.1에서는 i_t 가 구간별 상수이며 관측 노이즈가 독립이고 분산이 제한된 경우, 앙상블 ADI 추정기의 평균 제곱 오차(MSE)가 m·γ·ln n_t − (1/γ)·ln β·m·(1−β)·T − m + (γ/8)·T + m·σ_*^2·ln(𝒯 e) 로 상한이 있음을 증명한다. 여기서 m은 변화 횟수, n_t는 현재까지 사용된 필터 수, σ_*^2는 최대 노이즈 분산을 의미한다. 이 식은 β가 작을수록(과거 정보를 많이 보존) MSE가 감소함을 시사한다.
실험에서는 스탠포드 드론 데이터셋을 사용한다. 이 데이터셋은 60개의 비디오와 8개의 장면으로 구성되며, 보행자, 자전거, 카트 등 다양한 행위자를 포함한다. 각 프레임에서 행위자의 2D 위치를 추출하고, 이동 평균으로 잡음(주석의 이산화)을 완화한다. 동적 공분산 모델을 적용해 각 시점의 평균 m_t와 공분산 Σ_t 를 커널(K_h, h=5) 기반으로 추정하고, 조건부 상호정보는 가우시안 공분산 행렬식 차이로 계산한다.
앙상블 ADI 파라미터는 τ=10, β=0.01, γ=1, 기본 필터 집합 G={exp(0.1), exp(0.2), uniform} 로 설정하였다. 거리 기준(100픽셀) 내에 있는 행위자 쌍에 대해서만 ADI를 계산했으며, 결과는 다음과 같다.
1. **개별 상호작용 사례**: 두 보행자(5와 25)가 만나 대화를 나누는 장면에서 ADI가 급증하고, 5→25 방향이 25→5보다 크게 나타났다. 이는 ADI가 방향성까지 포착함을 보여준다.
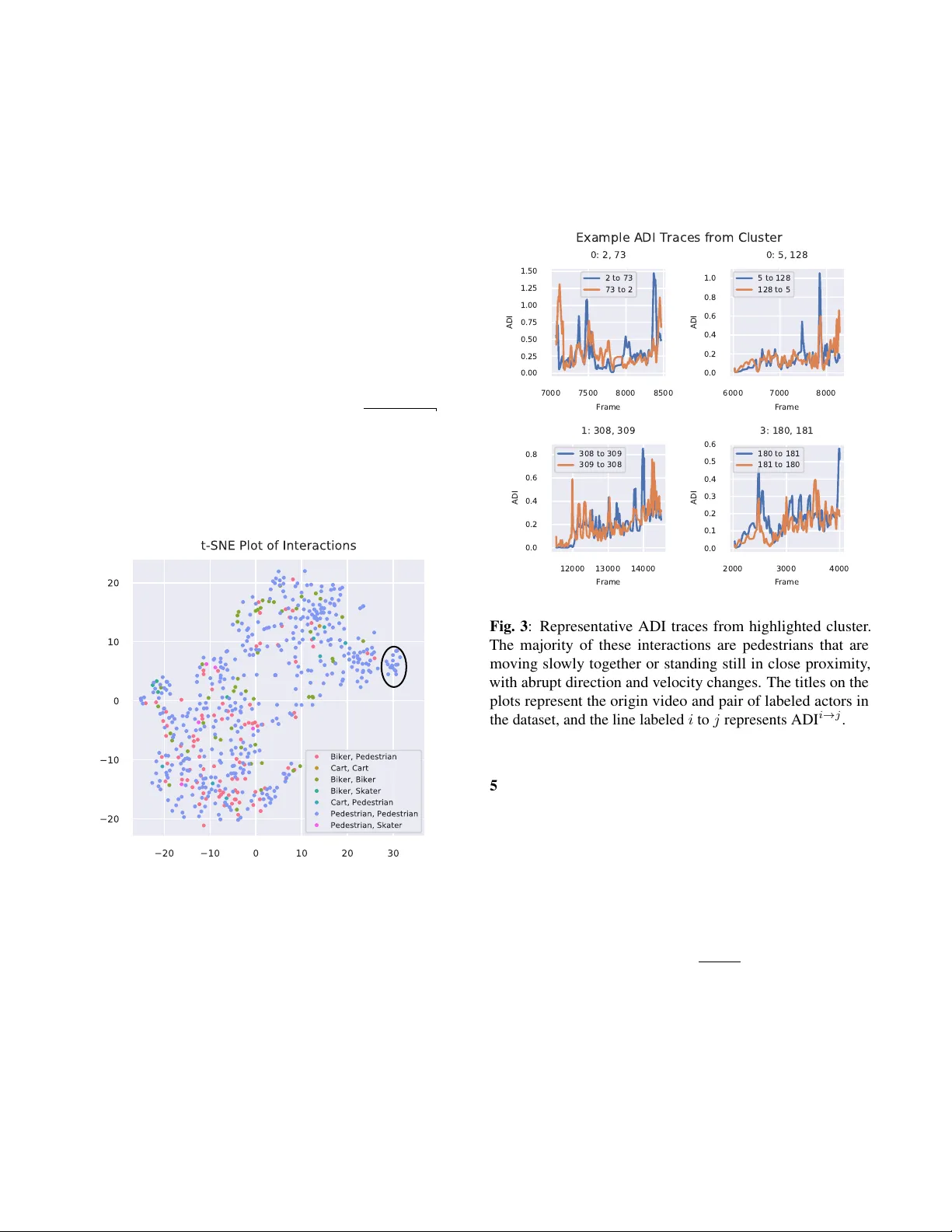
2. **클러스터링 및 시각화**: 모든 상호작용(539개)에 대해 대칭 ADI(ADI_i→j + ADI_j→i)를 계산하고, 이를 유사도 행렬 A로 변환한 뒤 t‑SNE로 2차원에 투영했다. 보행자‑보행자, 보행자‑자전거, 자전거‑카트 등 유형별로 뚜렷한 클러스터가 형성되었으며, 특히 보행자 간 저강도·고빈도 상호작용이 작은 군집을 이룬다.
3. **속도와 ADI의 관계**: 각 행위자의 순간 속도와 속도 각도를 계산해, 고속·동일 방향(낮은 각도) 상호작용은 안정적인 ADI를, 고속·반대 방향(높은 각도) 상호작용은 변동성이 큰 ADI를 보였다. 이는 ADI가 물리적 움직임 변화에 민감하게 반응한다는 점을 뒷받침한다.
4. **유형별 평균 ADI**: 스케이터는 가장 낮은 평균 ADI를, 자전거와 카트는 가장 높은 평균 ADI를 보였다. 특히 보행자가 자전거와 카트에 미치는 영향이 크며, 반대 방향은 상대적으로 작았다. 이는 빠른 이동체가 주변 환경에 더 크게 반응한다는 직관과 일치한다.
결론적으로, 앙상블 기반 ADI는 기존 ADI가 갖는 파라미터 의존성을 크게 완화하고, 급격한 변화와 완만한 변화 모두를 효과적으로 추적한다. 실험 결과는 복잡한 군중 영상에서 의미 있는 상호작용을 자동으로 탐지하고, 유형별 행동 분석에 활용 가능함을 보여준다. 향후 연구에서는 ADI를 데이터 요약, 이상 탐지, 혹은 다른 머신러닝 파이프라인의 전처리 단계로 통합하는 방안을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기