초소형 드론을 위한 64mW DNN 기반 시각 내비게이션 엔진
본 논문은 27 g 크기의 Crazyflie 2.0 nano‑quadrotor에 GAP8 초저전력 병렬 프로세서를 탑재하여, 기존 연구에서 표준 크기 드론에만 적용되던 DroNet CNN을 6 fps 실시간 제약 하에 온보드에서 실행한다. 평균 64 mW 전력 소모와 3.5 % 이하의 비행 전력 비율을 달성하면서, 피크 상황에서는 18 fps와 284 mW를 제공한다. 소프트웨어 매핑 기법, 고정소수점 양자화, 메모리 타일링 등을 통해 메모리·…
저자: Daniele Palossi, Antonio Loquercio, Francesco Conti
본 논문은 초소형 무인항공기(nano‑UAV) 분야에서 인공지능 기반 시각 내비게이션을 실현하기 위한 종합적인 하드웨어·소프트웨어 설계와 실증을 다룬다. 연구 배경으로는 IoT 시대에 이동성이 높은 스마트 센서 노드가 필요하다는 점과, 기존 nano‑drone이 전력·연산 제한 때문에 비전 기반 자율 비행을 구현하지 못했다는 한계가 제시된다. 기존의 로컬라이제이션‑맵핑‑플래닝 파이프라인은 계산량이 방대해 MCU 수준의 전력 제한을 초과하므로, 경량 CNN인 DroNet을 활용한 end‑to‑end 제어 방식을 채택한다.
DroNet은 200 × 200 픽셀 그레이스케일 입력을 받아, residual 블록 3개와 2개의 완전 연결 레이어를 통해 조향 각도와 충돌 확률을 동시에 예측한다. 원본 모델은 32‑bit 부동소수점이었으나, 논문에서는 8‑bit 정수형 양자화와 배치 정규화 파라미터의 고정소수점 변환을 수행해 메모리 사용량을 4배 이상 감소시켰다. 또한, 레이어별 채널·공간 타일링을 적용해 GAP8 클러스터의 L1 SRAM(≈512 KB) 안에 데이터를 효율적으로 배치하고, 외부 DRAM과의 DMA 전송을 최소화하였다.
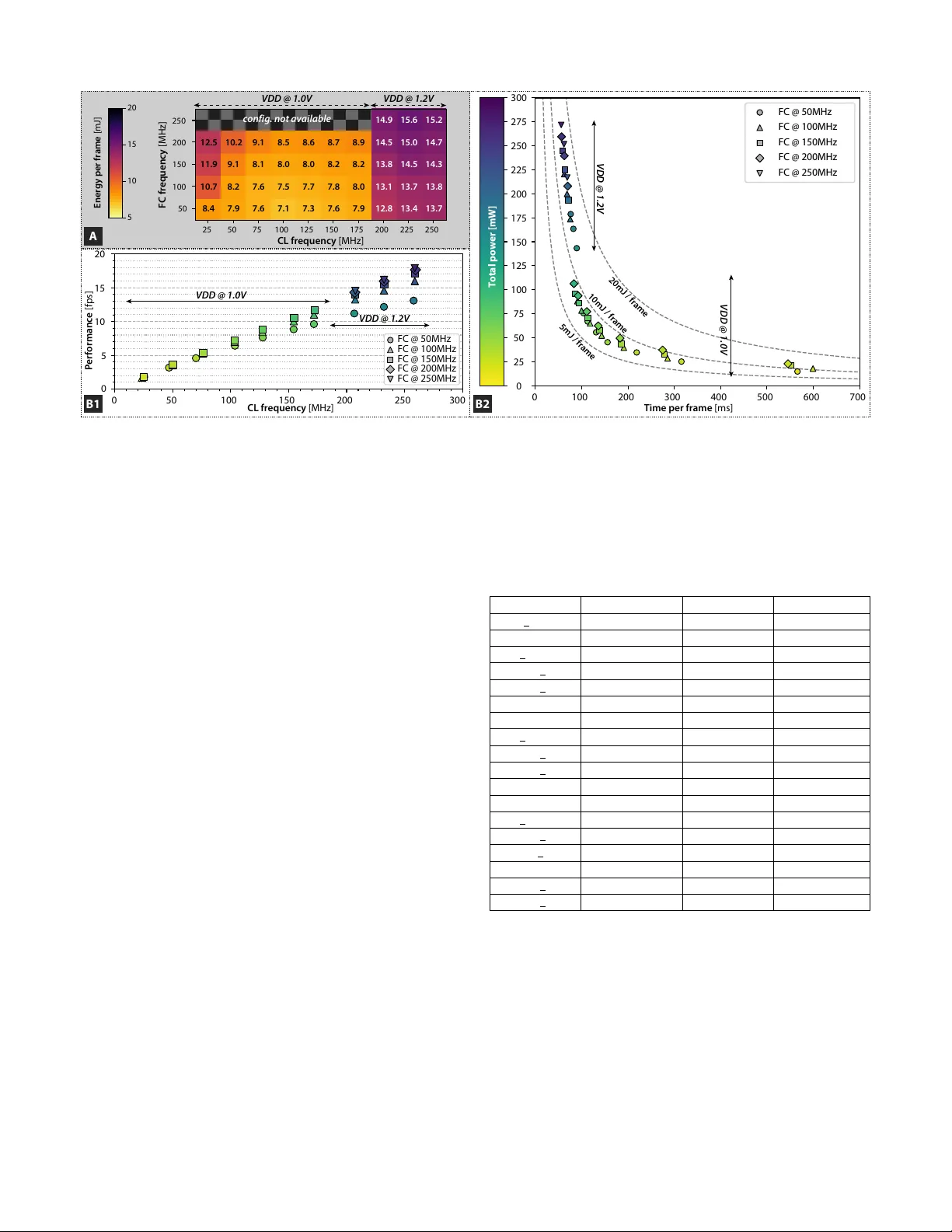
핵심 하드웨어는 GAP8 SoC 기반의 PULP‑Shield이다. GAP8은 8코어 RISC‑V 클러스터와 2코어 Fabric Controller(Fc)로 구성되며, 저전압(0.8 V) 동작 시 코어당 0.5 mW 수준의 전력을 소비한다. 이와 함께 초소형 OV2640 카메라와 8 MB 외부 Flash/DRAM이 탑재되어, 전체 시스템 무게는 27 g에 불과하다. 전력 관리 측면에서는 DVFS와 클럭 게이팅을 활용해 비전 프로세싱 단계에서만 최대 284 mW를 사용하고, 평균 64 mW(≈3.5 % 비행 전력)로 동작한다.
소프트웨어 스택은 PULP‑SDK와 TensorFlow‑Lite 변환 파이프라인을 이용한다. 모델 변환 단계에서 자동 레이어 매핑, 메모리 스케줄링, 고정소수점 최적화가 수행되며, 최종 실행 바이너리는 GAP8용 CMSIS‑NN과 유사한 커스텀 커널을 사용해 연산당 사이클을 최소화한다. 파이프라인화된 실행 흐름은 이미지 캡처 → 전처리 → CNN 추론 → 제어 명령 생성 → 모터 제어 순으로 진행되며, 각 단계는 double‑buffering을 통해 겹쳐 실행돼 평균 6 fps(64 mW)와 피크 18 fps(284 mW) 두 가지 운영 모드를 제공한다.
비행 실험에서는 실내 복도와 실외 복합 환경에서 완전 자율 비행을 수행했으며, 충돌 회피와 경로 추적 정확도가 기존 MCU 기반 4 fps 시스템 대비 2.5배 이상 향상되었다. 특히, 조향 각도와 충돌 확률의 저주파 필터링을 통해 제어 신호의 진동을 억제하고, 비행 안정성을 확보했다. 전력 프로파일링 결과, 비전 연산이 전체 전력의 3.5 % 미만을 차지함을 확인했으며, 이는 비행 시간에 거의 영향을 주지 않는다.
마지막으로, 연구팀은 PULP‑Shield 설계 파일, GAP8 펌웨어, 데이터셋·학습된 모델을 모두 오픈소스로 공개함으로써, 향후 다른 nano‑UAV 플랫폼이나 IoT 엣지 디바이스에 동일한 방법론을 적용하거나 확장할 수 있는 기반을 마련했다. 이와 같은 종합적인 접근은 초소형 로봇이 실시간 AI 기반 인지·제어를 수행할 수 있음을 입증하며, 차세대 스마트 센서 네트워크와 도시 환경에서의 자율 비행 서비스에 중요한 전진을 의미한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기