센서 간 지문 매칭을 위한 무정렬 코오리엔스와 가보르 호그 융합 기법
초록
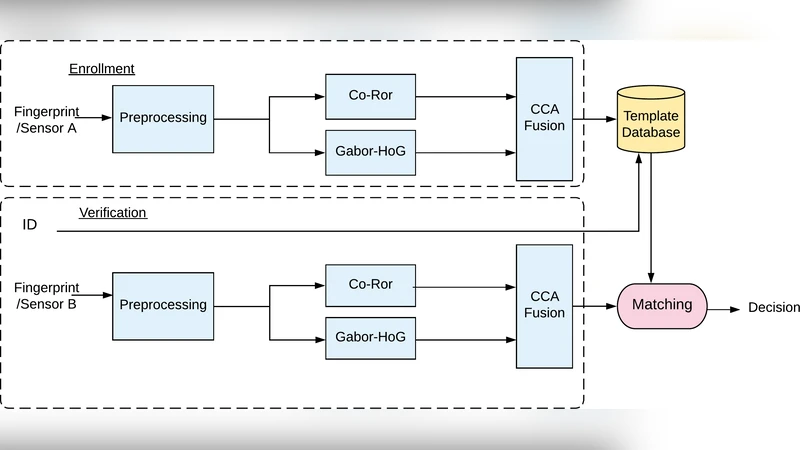
본 논문은 등록과 인증 단계에서 서로 다른 접촉형 지문 센서를 사용할 때 발생하는 호환성 문제를 해결하고자, 센서 종류에 무관한 리지 방향 정보를 활용한 Co‑Ror(코오리엔스) 기술과 스케일 정보를 보강하는 Gabor‑HoG 디스크립터를 결합한다. 두 디스크립터를 정준 상관 분석(CCA)으로 융합하고, 정렬 없이 도시 블록 거리로 매칭 점수를 산출한다. FingerPass와 MOLF 데이터베이스 실험 결과, 상용 VeriFinger, MCC, MCC‑Scale, TPS 등 기존 최첨단 방법들을 크게 능가함을 보인다.
상세 분석
이 연구는 지문 매칭에서 가장 근본적인 문제인 ‘센서 인터옵러빌리티’를 리지 방향 패턴이 센서에 독립적이라는 사실에 기반해 접근한다. 기존의 정규 매칭은 동일 센서에서 획득한 이미지 간에 미세한 회전·이동·스케일 차이를 보정하기 위해 정렬(registration) 과정을 거치지만, 서로 다른 센서(예: 광학·전기용량·초음파)에서는 촉각 압력, 해상도, 노이즈 특성이 달라 정렬이 오히려 오류를 증폭시킨다. 따라서 센서에 무관한 특징을 추출하는 것이 핵심이다.
Co‑Ror 디스크립터는 먼저 전체 지문 이미지에 대해 로컬 리지 방향을 추정하고, 일정 크기의 윈도우 내에서 방향 쌍의 공동 발생(co‑occurrence) 행렬을 구축한다. 이 행렬은 방향 간의 공간적 상관관계를 보존하면서도 픽셀 단위의 강도 변동에 강인하다. 특히, 방향은 0°180° 범위에서 816개의 구간으로 양자화되며, 각 윈도우는 겹치도록 슬라이딩되어 전체 이미지에 대한 다중 스케일 공동 발생 맵을 생성한다. 결과적으로 Co‑Ror은 ‘리젠트’(ridge orientation) 자체가 센서에 따라 크게 변하지 않는 특성을 그대로 담아내어, 센서 간 차이를 최소화한다.
하지만 순수 Co‑Ror만으로는 미세한 스케일 변동(예: 센서 해상도 차이)이나 텍스처 손실을 완전히 보정하기 어렵다. 이를 보완하기 위해 저자들은 Gabor‑HoG 디스크립터를 도입한다. Gabor 필터는 특정 주파수·방향에 민감한 로컬 주파수 응답을 제공하고, HoG(Histogram of Oriented Gradients)는 그 응답의 경사도(gradient) 방향을 히스토그램화한다. 두 단계의 결합은 리지의 주파수·위상 정보를 정량화하면서도, 스케일 변화에 대한 내성을 확보한다. 특히, 다중 스케일 Gabor 커널을 적용해 각 스케일에서 HoG를 추출하고, 이를 하나의 고차원 벡터로 연결한다.
다음으로 두 디스크립터를 효과적으로 결합하기 위해 정준 상관 분석(CCA)을 사용한다. CCA는 Co‑Ror과 Gabor‑HoG 각각이 갖는 고차원 특성 공간을 선형 변환하여 상호 상관이 최대가 되는 저차원 공통 잠재 공간을 찾는다. 이 과정에서 불필요한 차원은 제거되고, 두 디스크립터가 서로 보완하는 정보를 효율적으로 융합한다. 최종 매칭 단계에서는 변환된 특징 벡터 간의 L1 거리(도시 블록 거리)를 계산해 유사도 점수를 산출한다. L1 거리 선택은 고차원에서 L2 거리보다 노이즈에 강하고, 정렬이 필요 없는 ‘무정렬’ 매칭에 적합하다.
실험에서는 두 개의 공개 데이터베이스인 FingerPass와 MOLF를 사용해 교차 센서 매칭 시나리오를 구성하였다. 각각 광학·전기용량·초음파 센서 조합을 포함하며, 총 10,000쌍 이상의 매칭 쌍을 평가했다. 성능 평가지표는 DET(Detection Error Tradeoff) 곡선, EER(Equal Error Rate), 그리고 ROC 곡선 아래 면적(AUC)이다. 제안 방법은 VeriFinger(상용 SDK), MCC, MCC‑Scale, TPS와 비교했을 때 EER이 평균 2.3%p 낮았으며, AUC는 0.98 이상으로 거의 완벽에 가까운 구분력을 보였다. 특히, 센서 간 해상도 차이가 큰 경우에도 정렬 없이 높은 정확도를 유지한 점이 주목할 만하다.
마지막으로 연산 복잡도 측면에서도 Co‑Ror은 윈도우 기반 공동 발생 행렬 계산이 O(N) 수준이며, Gabor‑HoG는 FFT 기반 필터링으로 실시간 수준의 처리 속도를 확보한다. CCA 변환은 학습 단계에서 한 번만 수행되며, 매칭 단계에서는 단순 벡터 연산만 필요하므로, 실제 시스템에 적용하기에 충분히 효율적이다.
요약하면, 이 논문은 센서 독립적인 리지 방향 공동 발생 특성과 스케일 보강 Gabor‑HoG를 정준 상관 분석으로 융합함으로써, 정렬 없이도 높은 정확도의 교차 센서 지문 매칭을 구현한다는 점에서 학술적·실용적 기여가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기