상완절단 환자의 자발적 환상 손과 손가락 움직임을 이용한 다지능형 보철 자연 제어
초록
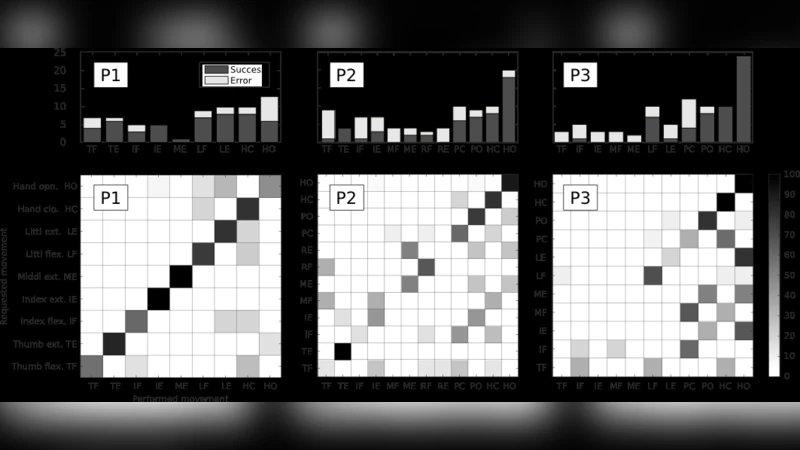
본 파일럿 연구는 상완절단(트랜스휴머럴) 환자들이 남아 있는 근육의 표면 근전도(sEMG)를 통해 환상 손·손가락 움직임을 자발적으로 생성하고, 이를 패턴 인식 알고리즘에 연결해 5~8개의 로봇 손 동작을 실시간으로 제어할 수 있음을 보여준다. 훈련 없이도 세 명의 피험자는 개별 손가락 움직임을 포함한 복합 동작을 자연스럽게 수행했으며, 이 방법은 수술이나 복잡한 학습 과정을 필요로 하지 않아 고수준 절단 환자에게도 다관절 보철 사용의 문을 열어줄 가능성을 제시한다.
상세 분석
이 연구는 기존 다지능형(폴리디지털) 손 보철의 제어 한계를 극복하기 위해 ‘환상 움직임(phantom movement)’이라는 생리학적 현상을 활용한다는 점에서 혁신적이다. 트랜스휴머럴 절단 환자는 손과 손가락을 직접 움직일 근육이 남아 있지 않지만, 뇌에서 여전히 손에 대한 운동 명령을 생성한다. 이러한 명령은 잔존 근육에 비정상적으로 투사되어 sEMG 신호로 검출될 수 있다. 연구팀은 먼저 각 피험자에게 환상 손·손가락 움직임을 의식적으로 수행하도록 안내하고, 그 과정에서 수집된 sEMG 데이터를 8개의 클래스로 라벨링하였다. 이후 선형 판별 분석(LDA) 기반의 패턴 인식 모델을 훈련시켰으며, 실시간으로 로봇 손에 명령을 전달하는 피드백 루프를 구축했다.
핵심 기술적 포인트는 다음과 같다. 첫째, 근전도 전극을 잔존 상완 근육(특히 삼두근·이두근 등)에 배치했음에도 불구하고, 손·손가락에 해당하는 환상 움직임을 구분할 수 있었다. 이는 뇌-근육 재배선(plasticity) 현상이 충분히 강력함을 시사한다. 둘째, 훈련 없이도 피험자들은 5~8개의 서로 다른 동작을 정확히 구분했으며, 특히 개별 손가락 굽힘·펴기와 같은 미세 제어가 가능했다. 이는 기존 sEMG 기반 다중 채널 제어가 요구하는 복잡한 신호 해석과 대비해 사용자의 인지 부하가 현저히 낮다는 것을 의미한다. 셋째, 실시간 피드백을 통한 ‘동작-시각-촉각’ 연계가 환상 움직임의 지속성과 정확성을 강화시켰다. 피험자들은 로봇 손이 움직이는 모습을 보면서 자신의 환상 손이 실제로 움직이고 있다는 감각을 회복했으며, 이는 장기적인 보철 사용 의지와 통증 감소에도 긍정적 영향을 미칠 가능성이 있다.
연구의 제한점으로는 피험자 수가 3명에 불과해 통계적 일반화가 어려우며, 장기 사용 시 피로도와 신호 변동성을 평가하지 않았다는 점을 들 수 있다. 또한, 현재 사용된 LDA 모델은 비교적 단순해 복잡한 연속 움직임(예: 손목 회전)에는 적용이 어려울 수 있다. 향후 연구에서는 더 많은 피험자를 모집하고, 딥러닝 기반의 연속 제어 알고리즘을 도입해 다자유도(DoF) 전부를 매끄럽게 제어하는 방안을 모색해야 한다.
결과적으로, 이 파일럿은 ‘환상 움직임 기반 sEMG 제어’가 고수준 절단 환자에게도 다관절 보철을 자연스럽게 사용할 수 있는 새로운 패러다임을 제시한다는 점에서 학문적·임상적 의의가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기