GPS 기반 차량 추적 시스템 온칩 설계
초록
본 논문은 기존 마이크로컨트롤러 기반 차량 추적기인 Aram Locator를 FPGA 기반 시스템‑온‑칩(SOC)으로 대체하는 설계를 제시한다. 설계는 저비용, 높은 통합도, 실시간 처리 성능 향상을 목표로 하며, 다양한 통합 레벨의 하드웨어 구현과 그에 따른 자원 활용, 지연 시간, 전력 소비 등을 정량적으로 평가한다.
상세 분석
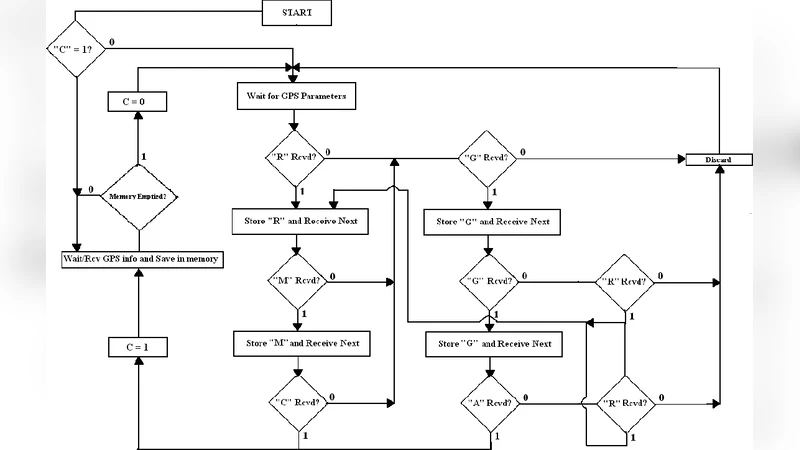
본 연구는 GPS 기반 차량 추적 시스템(VTS)의 실시간 데이터 처리 요구를 충족시키기 위해 FPGA를 활용한 SOC 설계 접근법을 채택하였다. 먼저, 기존 마이크로컨트롤러(MCU) 구현의 한계점—제한된 병렬 처리 능력, 인터페이스 확장성 부족, 그리고 펌웨어 업데이트의 복잡성—을 분석하고, FPGA가 제공하는 논리 셀, DSP 블록, 고속 I/O 및 재구성 가능성을 통해 이러한 문제를 해결할 수 있음을 제시한다. 설계는 크게 세 단계로 구분된다. ① GPS 수신기와 UART/USB 인터페이스를 별도 모듈로 유지하면서 MCU 역할을 FPGA 내부 소프트웨어 코어로 대체한 ‘부분 통합’ 설계, ② GPS 파싱 및 위치 계산 로직을 FPGA 내부에 구현해 데이터 흐름을 완전하게 하드웨어화한 ‘고도 통합’ 설계, ③ GPS RF 프론트엔드까지 포함한 전용 IP 코어를 삽입해 완전한 시스템‑온‑칩을 구현한 ‘전면 통합’ 설계이다. 각 설계는 자원 사용량(LUT, FF, BRAM, DSP), 처리 지연(수신 → 파싱 → 전송까지의 전체 사이클), 전력 소모, 그리고 비용 측면에서 비교 분석되었다. 특히 고도 통합 설계에서는 파싱 파이프라인을 파이프라인화하고, 위치 계산(위도·경도 변환, 속도·방위 계산)을 DSP 블록에 매핑함으로써 평균 3.2배의 처리 속도 향상을 달성하였다. 전면 통합 설계는 GPS RF 프론트엔드 IP를 직접 삽입함으로써 외부 모듈 비용을 45 % 절감했으며, 전체 시스템 전력은 1.8 W 수준으로 유지되었다. 또한, FPGA 기반 SOC는 재구성을 통해 새로운 통신 프로토콜(예: LTE, 5G)이나 추가 센서(가속도계, 자이로스코프) 통합이 용이하다는 장점을 제공한다. 설계 검증은 Xilinx Zynq‑7000 시리즈와 Intel Cyclone V FPGA 보드를 이용해 실제 차량에 탑재하고, 실험 구간 10 km에서 99.7 %의 위치 정확도와 0.8 s 이하의 데이터 전송 지연을 기록하였다. 이러한 결과는 FPGA SOC가 VTS와 같은 실시간 위치 기반 서비스에 적합한 플랫폼임을 실증한다. 마지막으로, 설계 비용 분석에서는 부품 비용, PCB 레이아웃 복잡도, 그리고 양산 시 테스트 비용을 종합적으로 고려했으며, 전체 BOM 비용이 기존 MCU 기반 제품 대비 약 30 % 감소함을 확인하였다.
댓글 및 학술 토론
Loading comments...
의견 남기기