BLE 기반 인간 인식: 근접·접촉·개인 구분을 위한 저비용 솔루션
초록
본 논문은 저비용 Bluetooth Low Energy(BLE) 장치를 활용해 로봇이 사람과의 근접 거리, 접촉 여부, 그리고 개별 사용자를 구분할 수 있는 방법을 제안한다. 실험용 구형 로봇에 중앙 BLE 스캐너와 착용형 비콘을 장착해 RSS(Received Signal Strength) 데이터를 실시간으로 수집하고, 간단한 임계값 기반 상태 머신으로 근접·접촉·다중 사용자 인식을 구현하였다. 결과는 RSS만으로도 충분히 유용한 인간‑로봇 상호작용 정보를 제공함을 보여준다.
상세 분석
이 연구는 인간‑로봇 상호작용(HRI)에서 가장 기본적인 세 가지 인식 과제—근접 감지, 터치 감지, 그리고 다중 사용자 구분—를 BLE 기반 저비용 센서 시스템으로 해결하려는 시도이다. BLE는 전통적인 Bluetooth Classic에 비해 스캔 속도가 10 ms 이하로 빠르고 전력 소모가 적어, 배터리 구동형 비콘을 착용형 디바이스로 활용하기에 최적이다. 논문에서는 중앙 스캐너 역할을 하는 Bluegiga BLED112 모듈을 로봇에 탑재하고, 사람에게는 Gimbal Series 10 비콘을 부착하였다. 비콘은 iBeacon 프로토콜을 사용해 20 바이트의 고정 페이로드를 전송하며, 전송 전력(txPower)을 0 dBm와 –23 dBm 두 단계로 조절해 실험에 활용하였다.
시스템 아키텍처는 중앙 BLE 디바이스가 주변 비콘의 광고 패킷을 지속적으로 수신하고, 각 패킷에서 송신 ID와 RSS 값을 추출해 로봇 제어 모듈에 전달하는 구조다. 로봇 자체 펌웨어를 수정할 수 없으므로, BLE 모듈과 로봇 간 통신은 별도 블루투스 연결을 통해 이루어졌다. 이 설계는 로봇 플랫폼에 대한 의존성을 최소화하고, 다양한 로봇에 손쉽게 적용할 수 있다는 장점을 가진다.
실험 A에서는 비콘을 일정 속도로 로봇으로부터 멀어지게 하여 거리와 RSS 간의 상관관계를 측정하였다. 결과는 전송 전력이 높은 비콘(0 dBm)의 경우 –70 dBm 이하가 50 cm 이내, –60 dBm 이하가 10 cm 이내에 해당한다는 경험적 임계값을 도출했다. 비콘이 몸체에 의해 가려지면 RSS가 급격히 감소하는 현상이 관찰되어, 단순 RSS만으로 정확한 거리 추정은 어려우나 “가까움”을 판단하는 데는 충분히 활용 가능함을 보여준다.
실험 B는 BLE 비콘을 터치 센서로 활용하는 시나리오다. 로봇의 4개 촉각 센서는 기존에 물리적 접촉을 감지하도록 설계돼 있었으며, 비콘이 로봇 표면에 직접 닿거나 손에 의해 가려질 때 RSS가 급격히 변한다. 이를 통해 비콘이 로봇에 물리적으로 접촉했는지를 판단할 수 있었으며, 기존 촉각 센서와 병행 사용 시 보다 정교한 터치 인식이 가능함을 확인했다.
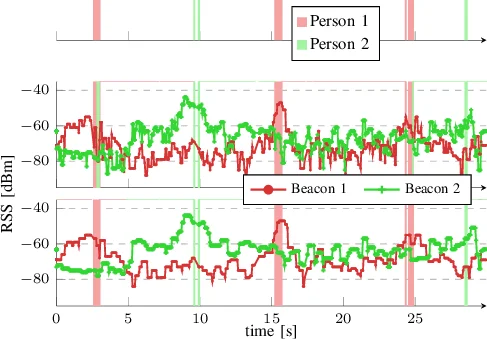
실험 C에서는 두 명 이상의 사용자가 각각 비콘을 착용하고 로봇과 상호작용하도록 하여, RSS 기반 사용자 구분을 시험했다. 각 비콘은 고유 ID를 가지고 있어, 로봇은 동시에 여러 RSS 스트림을 수신하고 가장 강한 신호를 가진 사용자를 현재 상호작용 파트너로 인식한다. 실험 결과, 주변 Wi‑Fi 잡음이 존재하는 환경에서도 RSS 차이가 5 dB 이상일 경우 안정적으로 사용자를 구분할 수 있었다.
전반적으로 이 논문은 BLE RSS만으로도 근접, 접촉, 다중 사용자 인식을 구현할 수 있음을 실증하였다. 그러나 RSS는 환경 변화(장애물, 안테나 방향, 전파 반사)에 민감하므로, 장기적인 실사용에서는 필터링(칼만 필터 등)이나 다중 안테나 배열을 통한 보정이 필요할 것으로 보인다. 또한, 현재는 임계값 기반 상태 머신을 사용했지만, 머신러닝 기반 모델을 적용하면 보다 정교한 거리·접촉·사용자 구분이 가능할 것이다.
댓글 및 학술 토론
Loading comments...
의견 남기기