인공지능 기반 지능형 튜터링 로봇 설계 가이드라인
초록
본 논문은 지능형 튜터링 로봇(ITR)의 최신 설계 동향을 체계적으로 검토하고, AI 기술 적용 현황을 정리한다. ITR‑학생·사회·교육과정 간 상호작용을 설명하는 관계 모델을 제시하고, 이를 인지‑계획‑행동(Perception‑Planning‑Action) 프레임워크로 전환해 적합한 AI 기법을 도출한다. 마지막으로 설계 지침과 향후 연구 방향을 제시한다.
상세 분석
이 논문은 지능형 튜터링 로봇(ITR)의 설계와 구현에 있어 인공지능(AI) 기술이 차지하는 역할을 체계적으로 분석한다. 먼저 저자들은 ITR이 작동하는 환경을 ‘학생(Student)’, ‘사회적 맥락(Social Milieu)’, ‘교육과정(Curriculum)’이라는 세 축으로 나누어 관계 모델(Relationship Model)을 구축한다. 이 모델은 로봇이 학습자와 실시간으로 상호작용하면서, 사회적 규범과 교육 목표를 동시에 고려해야 함을 강조한다. 특히, 사회적 맥락을 단순히 물리적 환경이 아니라 문화적 기대, 교사·학부모와의 협업, 그리고 동료 학습자와의 네트워킹으로 확장함으로써, 로봇이 인간 중심 교육에 자연스럽게 녹아들 수 있는 토대를 마련한다.
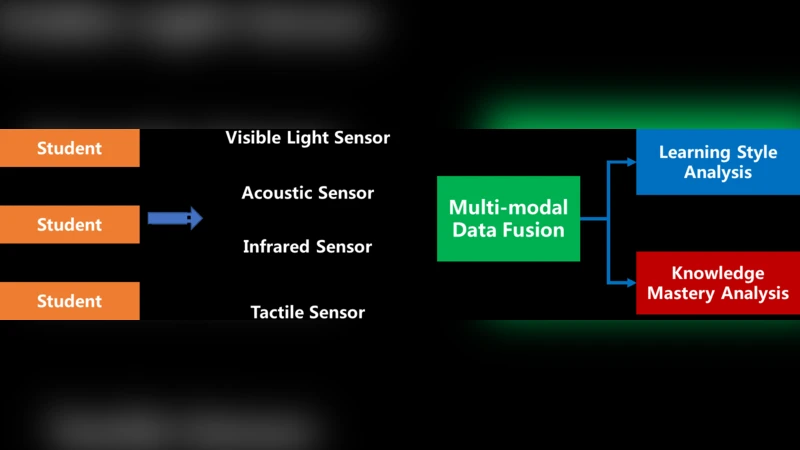
그 다음 단계에서 관계 모델을 인지‑계획‑행동(Perception‑Planning‑Action, PPA) 구조로 변환한다. 인지 단계에서는 컴퓨터 비전, 음성 인식, 감정 분석 등 멀티모달 센서 데이터를 통해 학습자의 상태와 환경을 실시간으로 파악한다. 여기서 딥러닝 기반 객체 탐지와 시퀀스 모델(RNN, Transformer)이 주로 활용되며, 특히 학습자의 눈 움직임·표정·목소리 톤을 종합해 ‘인지 부하’와 ‘동기 부여’를 추정한다.
계획 단계에서는 학습자 모델링, 적응형 학습 경로 설계, 그리고 대화 정책 수립을 위한 강화학습(RL)과 베이지안 추론이 적용된다. 저자들은 ‘학생 개인화 프로파일’을 구축하기 위해 지식 추적(Knowledge Tracing) 모델(예: Deep Knowledge Tracing)과 메타 학습(Meta‑learning) 기법을 결합한다. 이를 통해 로봇은 학습자의 현재 이해 수준과 선호 학습 스타일을 기반으로 최적의 문제와 피드백을 선택한다.
행동 단계에서는 자연어 생성(NLG), 로봇 팔·구동기 제어, 그리고 멀티모달 피드백(음성, 제스처, 화면) 전달이 핵심이다. 최신 대형 언어 모델(LLM)과 대화형 정책 네트워크를 이용해 상황에 맞는 설명, 힌트, 격려를 생성하고, 로봇의 물리적 동작은 역동학 제어와 인간‑로봇 상호작용(HRI) 안전 기준을 만족하도록 설계된다.
논문은 또한 현재 AI 적용의 한계점을 짚는다. 데이터 편향과 프라이버시 문제, 실시간 추론을 위한 연산 자원 제한, 그리고 ‘신뢰성’·‘투명성’ 부족이 주요 장애물로 제시된다. 이를 해결하기 위해 연합 학습(Federated Learning)과 경량화 모델(Quantization, Pruning) 도입을 권고한다. 마지막으로, 설계 지침으로는 (1) 멀티모달 센서 융합을 통한 정교한 학생 상태 인식, (2) 적응형 학습 경로를 위한 강화학습 기반 정책 설계, (3) 인간‑로봇 상호작용 안전성 확보, (4) 윤리·프라이버시를 고려한 데이터 관리, (5) 교육 현장과의 지속적 협업을 통한 피드백 루프 구축을 제시한다. 이러한 통합 프레임워크는 ITR이 단순한 교육 도구를 넘어, 학습자와 교사의 파트너로 자리매김하도록 돕는다.
댓글 및 학술 토론
Loading comments...
의견 남기기