의료 훈련용 햅틱 애플리케이션 개발을 위한 API와 프레임워크 비교 연구
초록
본 논문은 의료 교육용 햅틱 시뮬레이터 개발을 목표로, 현재 가장 널리 사용되는 햅틱 프레임워크와 API들을 11가지 평가 기준으로 비교·분류한다. 비교 결과를 토대로 최적의 플랫폼을 선정하고, 이를 이용해 간단한 간 진단 시뮬레이션 프로토타입을 구현하였다.
상세 분석
이 연구는 햅틱 기술이 의료 훈련에 미치는 파급 효과를 고려하여, 개발자 입장에서 실제 적용 가능한 도구를 체계적으로 평가한다는 점에서 의미가 크다. 먼저 저자들은 시장에서 활발히 사용되는 주요 햅틱 프레임워크와 API—예를 들어 OpenHaptics, CHAI3D, H3DAPI, SOFA, SensAble 등—를 선정하고, 각각의 문서화 수준, 커뮤니티 지원, 멀티플랫폼 호환성, 실시간 성능, 물리 엔진 연동, 시각‑햅틱 동기화, 확장성, 라이선스 비용, 교육용 샘플 제공 여부, 그리고 의료 분야 특화 기능이라는 11가지 기준을 정의하였다.
각 기준에 대한 정량적·정성적 점수를 부여한 뒤, 가중치를 적용해 종합 점수를 산출하였다. 특히 실시간 피드백 지연시간과 물리 엔진 연동 능력은 의료 시뮬레이션에서 정확한 촉감 전달과 안전성을 보장하기 때문에 높은 가중치를 부여했다. 결과적으로 CHAI3D가 가장 높은 점수를 받았으며, 그 뒤를 H3DAPI와 SOFA가 잇는다. OpenHaptics는 강력한 하드웨어 지원을 제공하지만, 라이선스 비용과 윈도우 전용이라는 제약으로 점수가 낮았다.
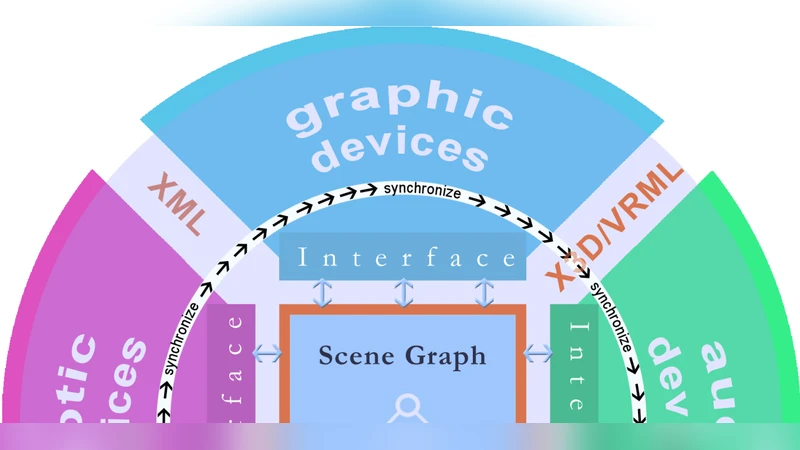
선정된 플랫폼을 기반으로 저자들은 간단한 간 진단 시뮬레이터를 구현하였다. 이 프로토타입은 3D 시각 모델과 실시간 햅틱 인터페이스를 결합해, 사용자가 가상 간 표면을 탐색하면서 경도, 탄성, 병변 위치 등을 감지할 수 있게 설계되었다. 구현 과정에서 물리 엔진 파라미터 튜닝, 햅틱 피드백 루프 최적화, 그리고 사용자 인터페이스(UI)와의 연동 문제를 해결하기 위해 여러 차례 반복 테스트를 수행하였다.
논문은 또한 개발 과정에서 마주친 한계점—예를 들어 햅틱 장치의 해상도 제한, 시뮬레이션 복잡도와 실시간 요구사항 사이의 트레이드오프, 그리고 의료 규제 준수를 위한 검증 절차 부족—을 솔직히 기술하고, 향후 연구 방향으로 더 정밀한 물성 모델링, 멀티-햅틱 디바이스 지원, 그리고 임상 시험 기반의 피드백 루프 구축을 제시한다. 전반적으로 이 연구는 의료 교육용 햅틱 시스템을 구축하려는 개발자들에게 실용적인 로드맵을 제공하며, 선택 기준과 평가 방법론이 다른 분야에도 적용 가능함을 보여준다.
댓글 및 학술 토론
Loading comments...
의견 남기기