프레임 간 변화만으로 CNN 추론 가속하기: CBinfer 기법
초록
CBinfer는 정적 카메라 영상에서 프레임 간 픽셀 변화가 적은 특성을 활용해, 변화가 발생한 영역만 재연산함으로써 기존 cuDNN 기반 구현 대비 평균 7~9배의 속도 향상을 달성한다. 정확도 손실은 0.1% 미만이며, 추가적인 모델 재학습 없이 바로 적용 가능하고, 에너지 효율도 7배 이상 개선된다.
상세 분석
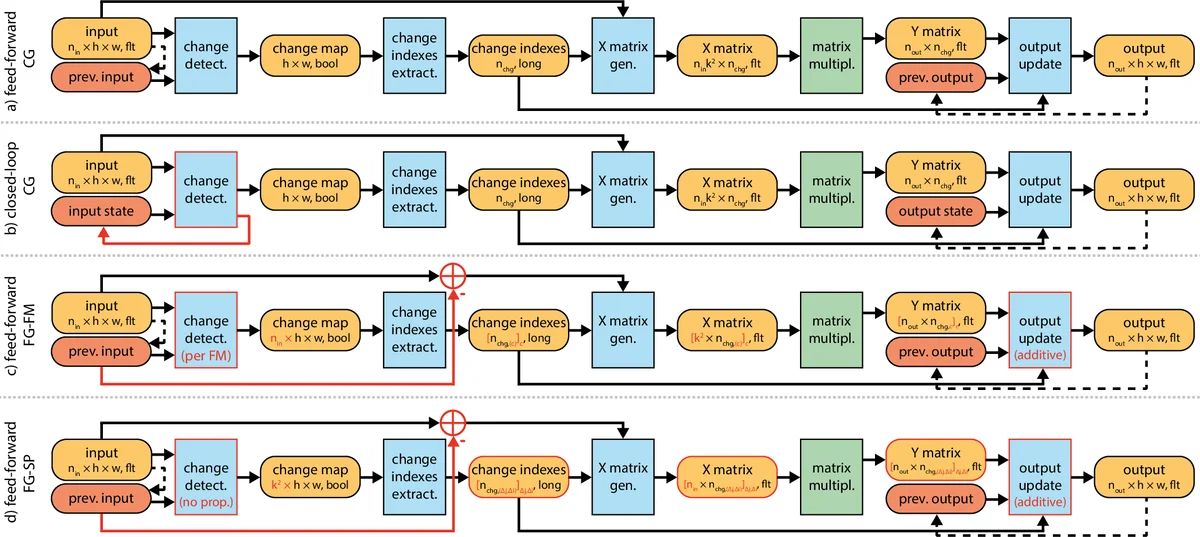
CBinfer는 “Change‑Based Inference”라는 이름 그대로, 입력 영상의 전·후 프레임 차이를 픽셀 수준에서 탐지하고, 변화가 있는 영역만을 대상으로 컨볼루션 연산을 수행한다. 핵심 아이디어는 컨볼루션 연산이 선형성을 갖기 때문에, 입력 이미지의 차분을 그대로 네트워크에 전달하면 출력 차분도 동일하게 계산될 수 있다는 점이다. 이를 위해 저자는 각 레이어마다 “변화 맵(change map)”을 유지하고, 이전 프레임의 출력과 현재 프레임의 입력 차분을 곱해 새로운 출력 변화를 구한다.
알고리즘은 크게 네 단계로 구성된다. 첫째, 현재 프레임과 이전 프레임 사이의 절대 차이를 구하고, 사전 정의된 임계값(threshold)보다 큰 픽셀을 변화 픽셀로 선정한다. 둘째, 선택된 변화 픽셀을 주변의 수용 영역(receptive field) 크기만큼 확장해 “활성화 영역”을 만든다. 셋째, 활성화 영역에 해당하는 입력 부분만을 기존 컨볼루션 커널과 곱해 부분 연산을 수행한다. 넷째, 부분 연산 결과를 이전 프레임의 출력에 누적해 최종 출력을 만든다.
이 과정에서 중요한 최적화 포인트는 (1) 변화 픽셀 검출 비용 최소화, (2) 활성화 영역을 과도하게 확대하지 않도록 적절한 패딩 및 블록 크기 선택, (3) 레이어마다 변화 전파를 정확히 추적해 누적 오차가 급격히 커지지 않도록 하는 것이다. 저자는 특히 7×7, 3×3 같은 큰 커널을 사용하는 초기 레이어에서 변화 전파가 크게 확대되는 현상을 관찰하고, 이를 억제하기 위해 “변화 제한(Limit)” 매커니즘을 도입했다. 이는 변화 픽셀 수가 일정 비율을 초과하면 전체 레이어를 강제로 재연산하도록 하는 안전장치다.
성능 평가에서는 NVIDIA Tegra X2(15 W 이하 전력) 위에서 Cityscapes 기반의 10‑class semantic segmentation 네트워크, OpenPose 기반의 pose detection, 그리고 YOLOv3 기반의 object detection을 실험했다. 정적 카메라 환경에서 평균 프레임당 연산량이 5배 이상 감소했으며, 전체 처리 시간은 7~9배 가속되었다. 정확도는 mIoU, AP 등 주요 지표에서 0.1% 이하의 손실만 보였다. 또한 전력 소모가 크게 줄어들어 GOp/s/W 기준 511 GOp/s/W를 기록, 기존 cuDNN 기반 구현의 70 GOp/s/W 대비 7배 이상의 에너지 효율을 달성했다.
CBinfer는 기존의 정밀도‑속도 절충 기법(양자화, 프루닝, 저‑정밀 연산)과 병행 사용할 수 있다. 즉, 모델 자체를 경량화하거나 가중치 희소성을 활용하면서도, 프레임 간 변화 기반의 연산 감소를 추가로 적용해 복합적인 가속 효과를 얻을 수 있다. 한계점으로는 카메라가 움직이거나 급격한 장면 전환이 빈번한 경우 변화 픽셀 비율이 급증해 전체 재연산이 필요하게 되며, 이때는 기존 방법과 동일한 비용이 발생한다. 또한, 임계값 선택이 데이터셋마다 민감하게 작용하므로 자동 튜닝 메커니즘이 필요하다.
전반적으로 CBinfer는 정적 혹은 저동적 카메라 환경에서 실시간 비전 애플리케이션을 구현하려는 임베디드 시스템 설계자에게 매우 실용적인 솔루션을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기