확산 지도와 칼만 필터를 이용한 비선형 시스템 상태 추정
본 논문은 고차원 비선형 확률 동역학 시스템을 모델링 없이 추정하기 위해, 확산 지도( diffusion maps )를 통해 데이터 기반의 가상 상태 좌표를 만든 뒤, 이 좌표에서 선형 드리프트와 관측 모델을 추정하고, 이를 이용해 선형 칼만 필터를 적용하는 새로운 비파라메트릭 프레임워크를 제안한다. 특히 그래디언트 플로우와 등방성 확산을 따르는 시스템에 대해, 확산 지도 좌표가 백워드 포커-플랑크 연산자의 고유함수를 근사함을 이용해 시스템의 …
저자: Tal Shnitzer, Ronen Talmon, Jean-Jacques Slotine
본 논문은 “Gradient Flow와 Isotropic Diffusion을 따르는 고차원 비선형 확률 동역학 시스템의 상태 추정을 위한 비파라메트릭 방법”을 제안한다. 기존의 파라메트릭 필터링 기법은 시스템 모델을 사전에 정의하고, 모델 파라미터를 추정해야 하는데, 복잡한 실제 시스템에서는 이러한 모델링이 어려워 비파라메트릭 접근법이 필요하다. 저자들은 두 가지 최신 이론—확산 지도(diffusion maps)와 쿠프만 연산자(Koopman operator)—를 결합해, 관측 데이터만으로 시스템의 내재 좌표와 선형 동역학을 자동으로 학습한다.
1. **문제 설정**
- 시스템은 compact Riemannian manifold M 위에서 정의된 Langevin 형태의 확률 미분 방정식 ˙θ = −∇U(θ) + √(2β)·u̇ 로 기술된다.
- 관측은 비선형 함수 g(θ)에 잡음 v가 더해진 형태 z = g(θ) + v 로 주어진다.
- 목표는 θ의 직접적인 접근 없이, z만으로 θ의 궤적을 추정하는 것이다.
2. **확산 지도 기반 좌표 복원**
- 관측 데이터 z_t 사이의 거리 d(z_s,z_t)를 수정된 Mahalanobis 거리로 정의하고, Gaussian kernel k_ε(s,t)=exp(−d²/ε²) 를 만든다.
- 커널을 정규화해 Markov 연산자 P_ε 를 구성하고, L_ε = P_ε − I_ε 로 정의한다.
- L_ε 의 고유값·고유함수는 ε→0 일 때 백워드 포커-플랑크 연산자 L = (1/β)Δ − ∇·∇U 로 수렴한다는 이론적 결과를 이용한다.
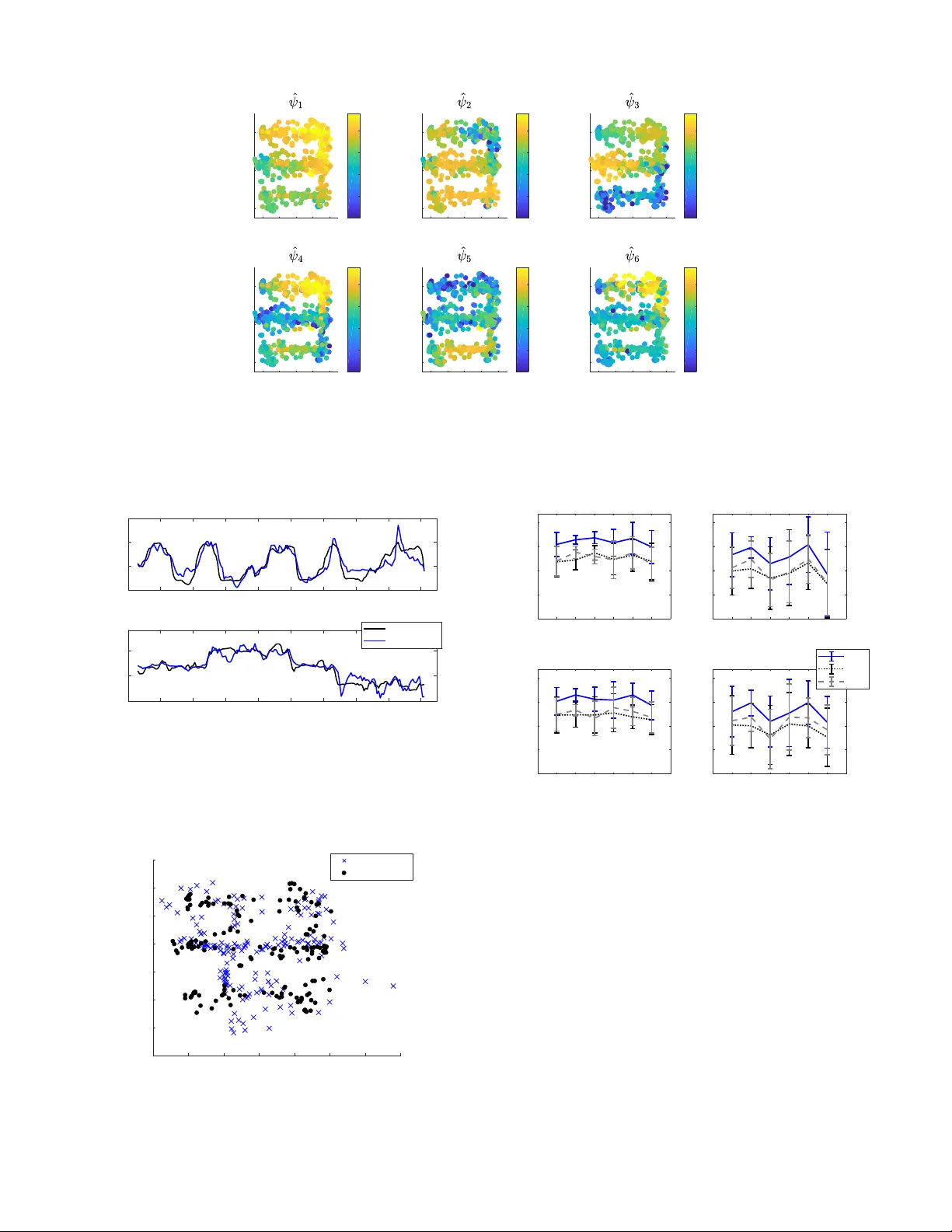
- L_ε 의 비자명 고유값(λ_i)와 고유함수(φ_i)를 계산하고, 가장 큰 k개의 고유함수를 선택해 Φ_t =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기