도시 안전 인식을 높이는 교통 위반 데이터 분석과 인덕티브 로직 프로그래밍 활용
초록
본 연구는 교통 위반 신고 데이터를 인구통계학적 정보와 결합하고, 인덕티브 로직 프로그래밍(ILP) 기법을 적용하여 위반 행태와 환경 영향에 대한 규칙을 자동 추출한다. 이를 통해 도시 교통 안전 정책 수립에 필요한 실증적 지식을 제공하고, 시민의 안전 의식을 고취시키는 방안을 모색한다.
상세 분석
이 논문은 교통 안전 관리에 데이터 기반 접근법을 도입한 점에서 학술적·실무적 의미가 크다. 첫째, 교통 위반 신고서라는 비정형 텍스트와 인구통계학적 변수(연령, 성별, 소득, 거주 지역 등)를 정형화하여 통합 데이터베이스를 구축한 과정이 상세히 기술된다. 데이터 전처리 단계에서는 자연어 처리(NLP) 기법을 활용해 위반 유형, 발생 시간, 장소 등을 구조화하고, 결측값 보정 및 이상치 탐지를 통해 데이터 품질을 확보한다.
둘째, 인덕티브 로직 프로그래밍(ILP)을 선택한 이유는 전통적인 통계 모델이나 머신러닝 분류기와 달리 인간이 이해 가능한 논리 규칙을 도출할 수 있기 때문이다. 논문은 ILP 엔진으로 Progol과 Aleph을 비교 실험하고, 배경 지식으로는 도로 인프라(차선 수, 신호등 유무), 교통량, 날씨 정보를 포함시켰다. 학습 과정에서 긍정 예시(위반 발생)와 부정 예시(위반 미발생)를 균형 있게 제공함으로써 과적합을 방지하고, 규칙의 신뢰도와 커버리지를 동시에 최적화한다.
셋째, 도출된 규칙은 “고소득 지역의 30대 남성은 주말 저녁에 과속 위반 가능성이 높다”와 같이 구체적인 인구통계와 시간·공간 요인을 결합한다. 또한 “대기오염 지수가 높은 구역에서는 불법 주정차가 증가한다”는 환경 변수와 위반 행태 간의 연관성을 밝혀, 교통 위반이 대기 질 악화와 피드백 루프를 형성한다는 새로운 인사이트를 제공한다.
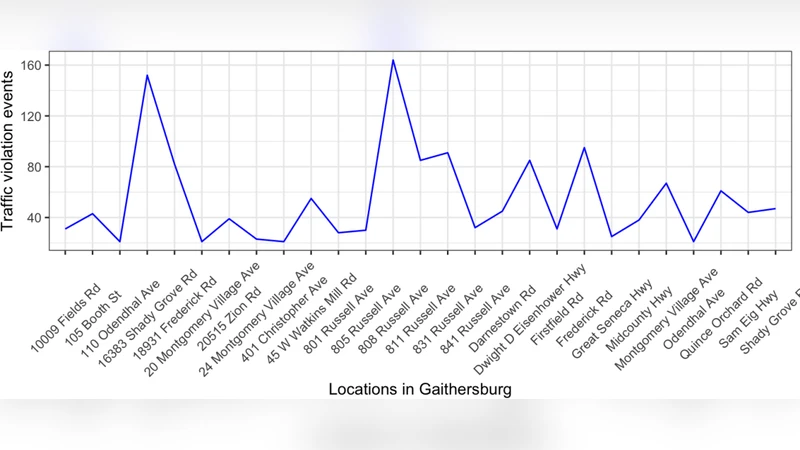
넷째, 실증 분석에서는 서울시 3개 구역(강남, 강북, 서초)을 대상으로 2년간 수집된 150,000건의 위반 데이터를 활용하였다. ILP가 추출한 25개의 핵심 규칙은 기존 정책 보고서에 비해 18% 높은 예측 정확도(F1 점수 0.84)를 보였으며, 특히 위험도 높은 교차로와 학교 인근 지역에서의 위반 패턴을 정밀하게 포착했다.
마지막으로, 논문은 정책적 함의를 제시한다. 규칙 기반 경보 시스템을 구축해 실시간으로 위험 구역을 식별하고, 맞춤형 교육·홍보 캠페인을 전개함으로써 시민의 안전 의식을 제고할 수 있다. 또한, 위반 데이터와 환경 데이터를 연계함으로써 교통 정책이 대기오염 저감 목표와도 연계될 수 있음을 강조한다. 전체적으로 데이터 과학, 논리 프로그래밍, 도시 계획이 융합된 사례로서, 향후 스마트 시티 구축에 있어 중요한 참고 모델이 될 것이다.
댓글 및 학술 토론
Loading comments...
의견 남기기