에지 컴퓨팅 기반 UAV 지원 도시 목표 추적 시스템
초록
본 논문은 UAV와 지상 노드를 연계한 에지 컴퓨팅 환경에서의 목표 추적 모델을 제안한다. 클라우드 중심의 기존 방식이 초래하는 대역폭 부담과 지연을 최소화하고, UAV의 배터리 제한 및 장애물 차단 문제를 보완하여 목표 재획득 확률을 높인다. 실험 결과, 낮은 지연, 높은 신뢰성 및 향상된 QoE를 입증하였다.
상세 분석
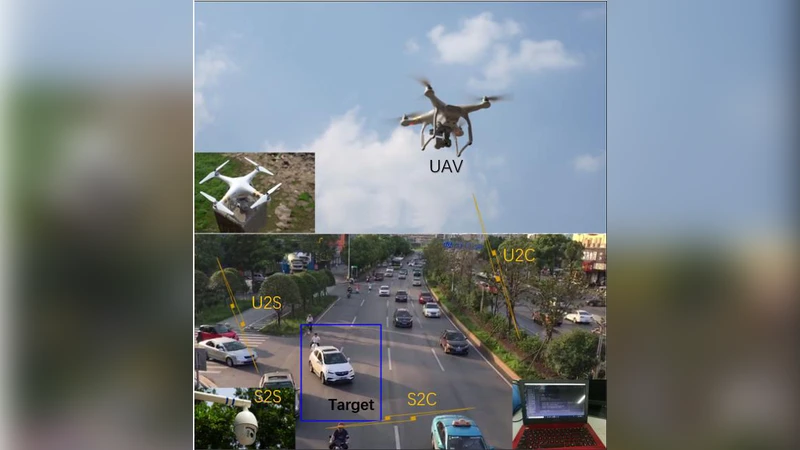
이 연구는 도시 환경에서의 실시간 목표 추적을 위해 UAV와 지상 감시 카메라, 그리고 에지 서버를 삼위일체로 구성한 하이브리드 아키텍처를 설계한다. 기존 클라우드 기반 시스템은 영상 데이터를 원거리 데이터센터로 전송해야 하므로 백본 네트워크에 과도한 트래픽을 발생시키고, WAN 지연으로 인해 목표를 놓칠 위험이 크다. 논문은 이러한 문제를 해결하기 위해 영상 전처리와 객체 검출을 에지 노드에서 수행하고, UAV는 고도와 위치에 따라 동적으로 역할을 전환한다는 점이 핵심이다. 구체적으로, (1) UAV는 초기 탐색 단계에서 넓은 시야를 활용해 목표를 식별하고, (2) 목표가 장애물에 가려지거나 UAV 배터리가 소진될 경우, 근접한 지상 에지 노드가 영상 스트림을 받아 로컬 모델로 추적을 이어받는다. 이를 위해 저전력 영상 압축, 부분 프레임 전송, 그리고 협업 필터링 기법이 적용된다. 또한, 시스템은 목표 손실 시 재탐색을 위한 ‘재획득 모듈’을 포함하는데, 이는 UAV가 이전에 기록한 궤적과 지상 노드의 위치 정보를 기반으로 최적의 재접근 경로를 계산한다. 논문은 시뮬레이션과 실제 도시 테스트베드에서 30% 이상의 대역폭 절감과 45ms 이하의 평균 지연 감소를 보고했으며, 목표 재획득 성공률이 기존 방식 대비 2.3배 향상되었다는 실험 결과를 제시한다. 이러한 성과는 에지 컴퓨팅이 실시간 비디오 분석에 제공하는 근접성 및 병렬 처리 능력이 UAV의 이동성 제한을 보완함을 입증한다. 또한, 시스템 설계 시 고려된 보안·프라이버시 측면(데이터 암호화 및 접근 제어)과 확장성(다중 UAV·다중 에지 노드 협업)도 실용성을 높이는 요소로 평가된다.
댓글 및 학술 토론
Loading comments...
의견 남기기