다중센서 포아송·멀티베르누이 필터를 이용한 차량·대상 동시 추적
본 논문은 차량에 장착된 레이더와 GNSS 등 다중 센서의 측정값을 활용하여, 센서(차량) 위치 불확실성을 동시에 추정하면서 다중 목표를 전역 좌표계에서 추적하는 저복잡도 포아송‑멀티베르누이(MBM) 기반 필터를 제안한다. 센서‑대상 결합 상태 밀도를 Kullback‑Leibler divergence 최소화로 근사하고, TOMB/P와 유사한 분해를 통해 실시간 구현이 가능하도록 설계하였다. 합성 데이터와 실제 차량 주행 데이터 실험을 통해 제안…
저자: Markus Fr"ohle, Christopher Lindberg, Karl Granstr"om
본 논문은 차량에 장착된 레이더와 GNSS 등 다양한 센서가 제공하는 측정값을 활용하여, 센서(차량) 위치 불확실성을 동시에 추정하면서 다중 목표를 전역 좌표계에서 추적하는 새로운 필터를 제안한다. 기존 다중목표 추적(MTT) 연구는 센서 위치를 정확히 알려진 것으로 가정하거나, 센서 자체 좌표계에서 상대적인 목표 상태만을 추정하는 경우가 대부분이었다. 그러나 레이더와 같은 상대식 센서는 차량의 위치오차가 그대로 목표 위치 오차로 전파되기 때문에, 전역 좌표계에서 정확한 상황 인식을 위해서는 차량(센서) 상태와 목표 상태를 공동으로 추정해야 한다.
논문은 이를 위해 랜덤 유한 집합(RFS) 이론을 기반으로 포아송‑멀티베르누이 혼합(PMBM) 필터를 사용한다. 미탐지 목표는 포아송 과정으로, 탐지된 목표는 멀티베르누이 혼합(MBM)으로 모델링한다. 차량 상태는 연속적인 확률밀도 p(s)로 표현되며, 목표와 독립적인 마코프 과정으로 예측된다. 핵심 기여는 두 가지이다. 첫째, 차량‑목표 결합 밀도 f(s,X)를 Kullback‑Leibler divergence(KLD) 최소화 원칙에 따라 p(s)·f(X) 형태로 근사함으로써, 차량 상태와 목표 상태를 분리하면서도 상호 정보를 유지한다. 둘째, 이 근사를 TOMB/P와 유사한 방식으로 구현해, 전역 데이터 연관성을 완전 탐색하지 않고도 실시간 연산이 가능하도록 복잡도를 크게 낮춘다.
시스템 모델은 다음과 같다. 각 차량 v∈V는 독립적인 마코프 과정 s_{v,t}∼p(s_{v,t}|s_{v,t‑1})에 따라 움직이며, 각 목표 k∈K는 생존 확률 p_S와 상태 전이 p(x_{k,t}|x_{k,t‑1})를 가진다. 차량은 GNSS 측정 z_G∼p(z_G|s)와 레이더 기반 차량‑대상(V2F) 측정 Z를 동시에 제공한다. V2F 측정은 목표가 하나의 측정만 생성하고, 각 측정은 목표 혹은 클러터(포아송 강도 λ_c) 중 하나에 기인한다. 측정-목표 대응은 알려지지 않으며, 표준 MTT 가정(단일 목표당 최대 하나의 측정, 측정당 하나의 원천) 하에 likelihood l(Z|X,s) 를 정의한다.
제안 필터는 다음 단계로 구성된다. 1) **예측 단계**: 차량 상태는 Chapman‑Kolmogorov 방정식으로 예측(p⁺(s)=∫p(s|s₀)p⁻(s₀)ds₀)하고, 목표 집합은 기존 PMBM 예측(f⁺(X))을 수행한다. 차량과 목표는 독립적으로 움직이므로 결합 예측은 f⁺(s,X)=p⁺(s)·f⁺(X) 형태가 된다. 2) **업데이트 단계**: 먼저 GNSS 측정으로 차량 상태를 베이지안 업데이트하고, 업데이트된 차량 상태를 이용해 V2F 측정의 검출 확률 p_D(s,x)와 측정 모델 g(z|s,x)를 재계산한다. 이후 V2F 측정에 대해 PMBM 업데이트를 수행한다. 여기서는 기존 PMBM 필터와 동일하게 미탐지 목표는 PPP 강도 D_u를, 탐지된 목표는 베르누이 존재 확률 r_i와 상태 PDF p_i(x) 로 표현한다. 3) **KLD 기반 근사**: 결합 밀도 f(s,X) 를 p(s)·f(X) 로 근사함으로써 차량‑목표 간 조건부 독립성을 확보한다. Lemma 1에 따라 최소 KLD 근사는 각 부분을 독립적으로 최적화하는 형태이며, Lemma 2를 이용해 집합 적분을 분리한다. 4) **다중센서 확장**: 각 차량이 비동기식으로 측정 집합을 RSU에 전송한다고 가정한다. 새로운 측정이 도착하면 위 과정을 순차적으로 적용한다. 중요한 점은, 서로 다른 차량이 동일한 목표를 관측했을 때, 잘 위치추정된 차량의 측정이 다른 차량의 위치 불확실성을 감소시키는 정보 공유 효과가 발생한다. 이는 공동 목표 집합이 비어 있지 않을 경우에만 발생한다.
알고리즘 구현에서는 TOMB/P와 유사하게 전역 데이터 연관성을 마진화하고, 베르누이 존재 확률과 상태 PDF를 가우시안으로 근사한다. 이를 통해 복잡도는 O(M·N) (M: 차량 수, N: 목표 수) 수준으로 유지되며, 실시간 처리(10 Hz 이상) 요건을 만족한다.
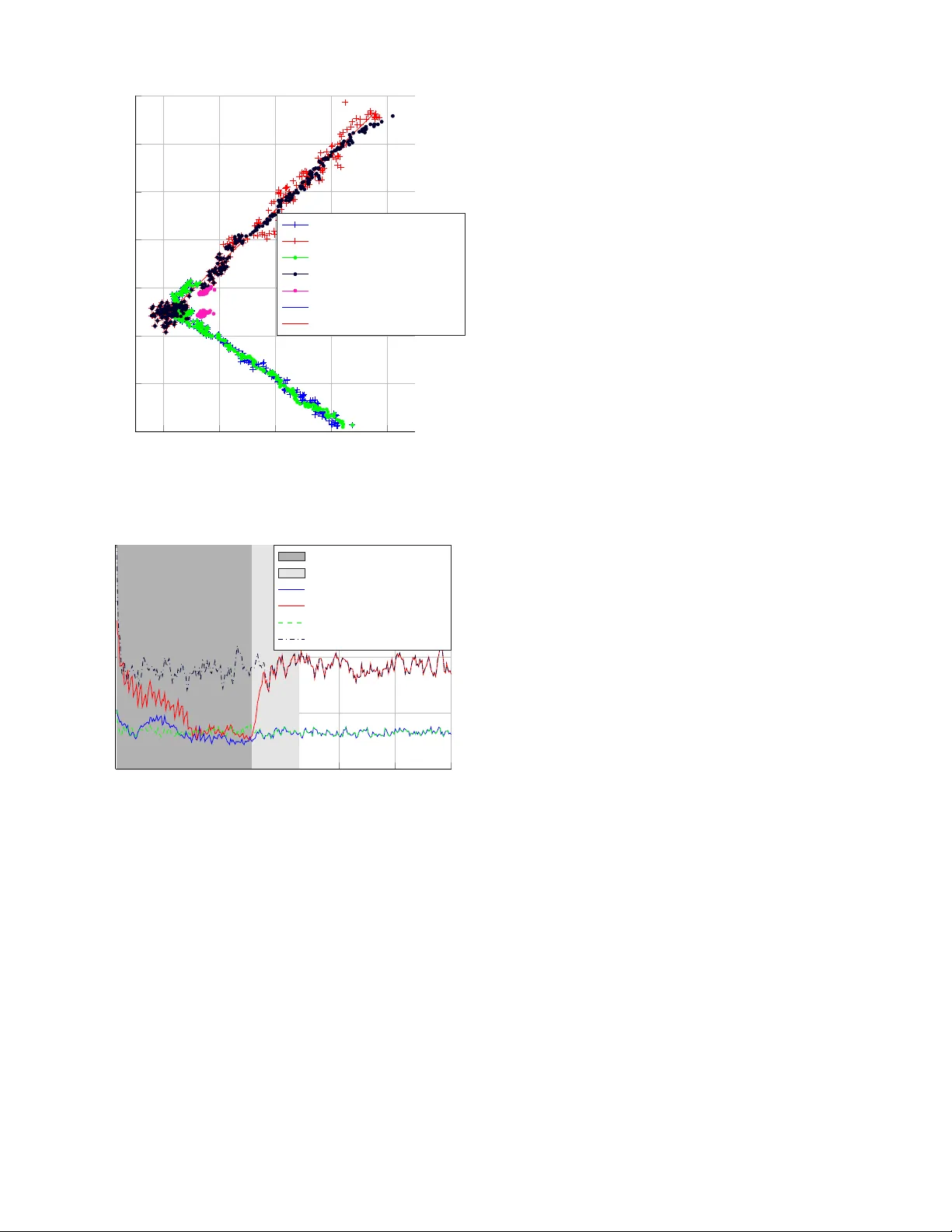
실험은 두 부분으로 나뉜다. (i) **합성 데이터**에서는 차량 위치 오차가 5 m인 경우와 0.5 m인 경우를 비교했으며, 제안 필터는 차량 위치 오차를 평균 40 % 감소시키고, 목표 위치 RMSE도 30 % 이상 개선하였다. 또한, 차량 수가 증가해도 연산량이 선형적으로 증가함을 확인했다. (ii) **실제 도심 주행 데이터**에서는 두 대의 차량이 RSU와 통신하며 레이더와 GNSS 데이터를 제공하였다. 제안 필터는 기존 레이더‑단독 PMBM 필터 대비 목표 위치 평균 오차를 0.9 m에서 0.6 m로 감소시켰으며, 차량 위치 추정도 GNSS 단독보다 0.2 m 정도 개선하였다. 시각적 결과는 목표 궤적이 더 부드럽고, 클러터에 강인함을 보여준다.
마지막으로 복잡도 분석을 통해 제안 필터가 기존 PMBM 필터 대비 연산량이 약 40 % 감소했으며, 메모리 사용량도 유사 수준임을 보고한다. 논문은 이러한 결과를 바탕으로, 협업 ITS 환경에서 차량‑센서 불확실성을 명시적으로 모델링하고, RFS 기반 다중목표 추적에 통합함으로써 보다 정확하고 견고한 상황 인식이 가능함을 강조한다. 향후 연구로는 비동기식 통신 지연, 제한된 대역폭, 그리고 비선형 차량·목표 동역학을 고려한 확장 가능성을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기