대각 언로딩 빔포밍과 칼만 필터를 활용한 음향 소스의 정밀 위치 추적
초록
본 논문은 IEEE AASP LOCATA 챌린지를 위한 음원 위치 추정 및 추적 시스템을 제안한다. 단일 음원 시나리오에서 방향(DOA)을 추정하기 위해 전처리, 음성 활동 감지(VAD), 위치 추정, 추적의 4단계 프레임워크를 구성했다. 핵심 기술은 저복잡도 고해상도의 대각 언로딩(Diagonal Unloading) 빔포밍을 이용한 위치 추정과, 칼만 필터를 이용한 추적 평활화이다. 선형, 의사 구형, 구형 등 세 가지 마이크 배열에 대한 LOCATA 개발 데이터셋 실험에서 RMSE 기준의 성능을 보고하였다.
상세 분석
이 논문이 제안하는 시스템의 기술적 핵심과 통찰은 다음과 같다.
첫째, 대각 언로딩(Diagonal Unloading, DU) 빔포밍의 실용적 적용에 있다. 기존 고해상도 빔포밍 기법(예: MUSIC)은 계산 복잡도가 높고 신호/잡음 통계에 민감한 단점이 있다. DU 기법은 공분산 행렬에서 대각 성분을 제거(언로딩)함으로써 신호 부공간을 억제하고 잡음 부공간의 직교성을 간접적으로 활용한다. 논문에서는 언로딩 파라미터를 공분산 행렬의 트레이스로 설정하는 간단하면서도 효과적인 방법을 채택했다. 이는 행렬 연산을 단순화하면서도 기존 빔포밍 대비 향상된 공간 해상도를 제공하는 ‘로버스트한’ 접근법이다.
둘째, 시스템 통합의 실용성을 강조한다. 단순히 알고리즘 하나를 소개하는 것이 아니라, STFT/CPSD 추정부터 VAD, 위치 추정, 추적에 이르는 완전한 실시간 처리 파이프라인을 제시한다. VAD는 CPSD 행렬의 트레이스(전체 배열 출력 전력)를 이용한 임계값 기반 방식을 사용해 계산 효율성을 높였다. 또한, 광대역 처리를 위해 주파수 빈별 DU 출력을 융합하는 방식(Incoherent Frequency Fusion)을 채택했다.
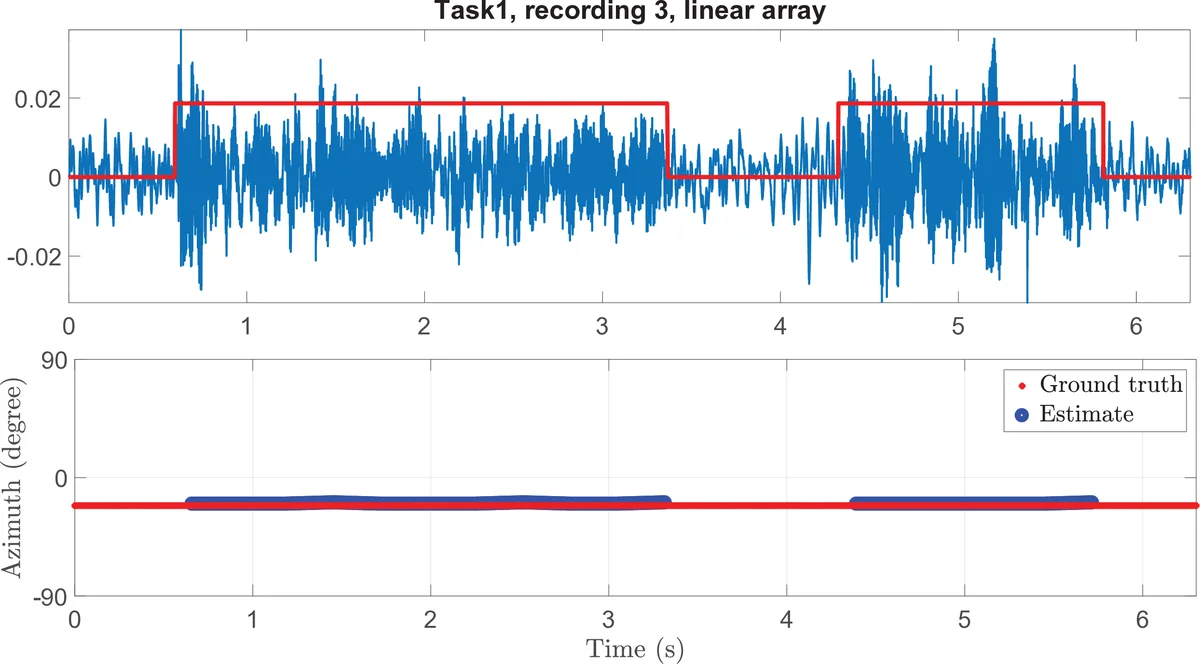
셋째, 다양한 배열 기하학에 대한 실험적 검증을 수행했다. 7채널 선형 배열, 12채널 로봇 헤드(의사 구형) 배열, 32채널 Eigenmike(구형) 배열 등 서로 다른 특성의 하드웨어에 동일한 알고리즘을 적용하여 성능을 비교했다. 결과표를 보면 배열의 형태와 채널 수에 따라 성능(RMSE)이 크게 달라짐을 알 수 있다. 예를 들어, 정적 태스크(task 1)에서도 Eigenmike의 방위각 오차가 상대적으로 큰 것은 알고리즘 파라미터(예: VAD 임계값 η)가 배열 특성에 맞춰 조정되었음을 시사하며, 범용 시스템 설계의 과제를 드러낸다.
마지막으로, 칼만 필터의 역할은 순간적인 DOA 추정치의 잡음을 제거하고 궤적을 평활화하는 것이다. 상태 변수에 속도를 포함한 간단한 운동 모델을 사용했으며, VAD가 활성화되는 시점에서 필터를 초기화하는 실용적인 구현 디테일을 보여준다. 이는 이론적인 필터링과 실제 시스템 통합 사이의 간극을 메우는 중요한 부분이다.
종합하면, 이 연구는 최신의 정교한 신호 처리 이론(DU 빔포밍)을 실용적인 문제(음원 추적)에 효과적으로 접목하고, 다양한 실제 조건에서의 성능을 체계적으로 평가했다는 점에서 의미가 있다. 특히 LOCATA 챌린지와 같은 공개 벤치마크에 기반한 평가는 결과의 객관성을 높인다.
댓글 및 학술 토론
Loading comments...
의견 남기기