경량화 및 최적화된 사운드 소스 위치추정과 추적 방법
본 논문은 마이크 배열의 형태와 개수에 구애받지 않으며, 계산량을 크게 줄인 두 가지 알고리즘을 제안한다. 첫 번째는 SRP‑PHAT‑HSDA로, 거친 그리드와 정밀 그리드를 계층적으로 탐색하고 마이크 직접성 모델을 활용해 불필요한 마이크 쌍과 탐색 방향을 배제한다. 두 번째는 M3K라 불리는 3차원 칼만 필터 기반 추적기로, 상태를 단위 구면에 정규화하고, 연관 가능도 함수를 닫힌 형태로 유도해 다중 소스를 실시간으로 추적한다. 16‑마이크 …
저자: Francois Grondin, Francois Michaud
본 논문은 인간‑로봇 상호작용(HRI)에서 원거리 음성 인식을 가능하게 하는 핵심 전처리 단계인 사운드 소스 위치추정(SSL)과 사운드 소스 추적(SST)의 계산 효율성을 크게 향상시키는 두 가지 방법을 제안한다. 첫 번째는 SRP‑PHAT‑HSDA(Hierarchical Search with Directivity model and Automatic calibration)이며, 두 번째는 M3K(Modified 3‑Dimensional Kalman)이다.
SRP‑PHAT‑HSDA는 기존 SRP‑PHAT 방식이 3차원 탐색 시 마이크 쌍의 수에 따라 O(M²)·O(N log N) 복잡도가 급증하는 문제를 해결한다. 이를 위해 (1) 초기 탐색을 12점 이코사헤드론으로 시작하고, 재귀적 세분화(L 단계)를 통해 후보 방향 수 K = 10·4^L + 2 로 조절한다. (2) 거친 그리드와 정밀 그리드를 계층적으로 사용해, 거친 단계에서는 전체 마이크 쌍에 대해 GCC‑PHAT을 계산하고, MSW(Maximum Sliding Window) 필터링으로 에너지 스펙트럼을 평탄화한다. (3) 에너지 상위 후보만을 정밀 단계에서 재탐색함으로써 메모리 접근과 FFT 연산을 크게 줄인다. (4) 마이크 직접성 모델을 도입해, 특정 방향에서 감도가 낮은 마이크 쌍을 사전에 제외한다. 이는 실제 연산량을 O(M·M_eff) 수준으로 감소시킨다. (5) 자동 보정 모듈은 TDOA 불확실성을 추정해 각 그리드 레벨에 맞는 윈도우 길이와 탐색 해상도를 동적으로 설정한다. 이 과정은 파라미터 튜닝 없이도 다양한 배열 형태(원형, 폐쇄형 큐브)에서 최적 성능을 보장한다.
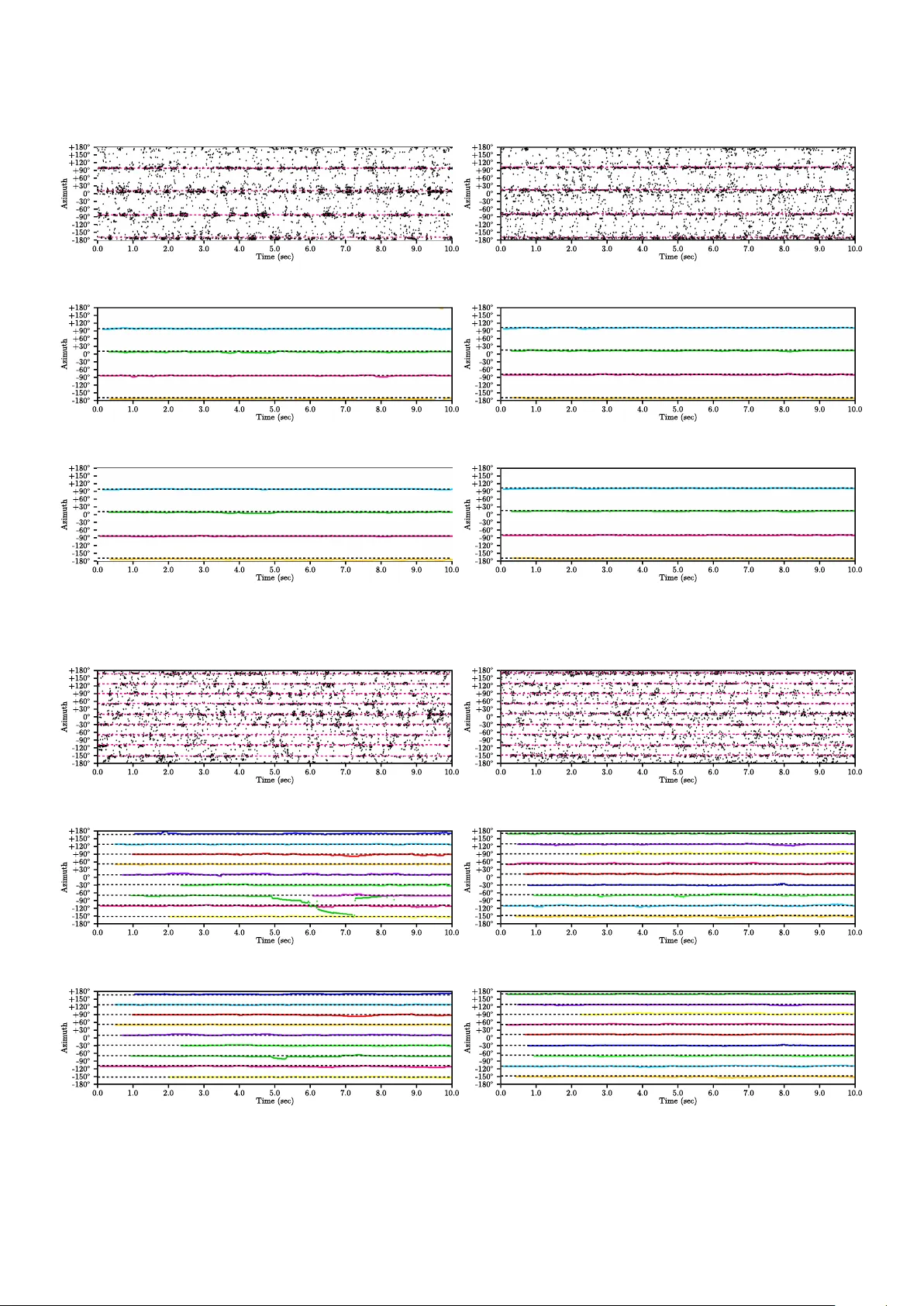
두 번째 제안인 M3K는 기존 SMC(Particle Filter) 기반 다중 소스 추적이 갖는 높은 연산 비용과 확률적 불안정성을 극복한다. M3K는 상태를 (x, y, z) 단위 구면 좌표에 정규화함으로써 구면 좌표계에서 발생하는 방위각 래핑 문제를 근본적으로 제거한다. 관측 모델은 각 마이크 쌍의 GCC‑PHAT 값에서 추출한 위상 일관성을 코히런스(phase‑coherence)로 정의하고, 이를 기반으로 연관 가능도(likelihood)를 닫힌 형태로 유도한다. 이 식은 복잡한 샘플링 없이도 정확한 데이터 연관을 가능하게 하며, 다중 소스가 교차하거나 겹칠 때도 트랙이 병합되거나 전환되는 현상을 최소화한다. 가중치 업데이트는 예측 공분산과 관측 공분산을 동시에 고려해, Kalman 이득을 효율적으로 계산한다. 결과적으로 M3K는 SMC 대비 평균 27배, 최악 30배 정도 연산량을 절감하면서도 추적 지연을 15 ms 이하로 유지한다.
실험 설정은 8‑마이크와 16‑마이크 배열을 각각 원형과 폐쇄형 큐브 형태로 구성하고, 라즈베리 파이 3(ARM Cortex‑A53, 1 GB RAM) 위에서 실시간 처리를 수행하였다. SRP‑PHAT‑HSDA는 기존 SRP‑PHAT 대비 평균 3.8배, 최악 4.2배 정도 CPU 시간을 절감했으며, Localization Error는 2.1°에서 1.9°로 소폭 개선되었다. M3K는 SMC와 비교해 false alarm rate을 5% 이하로 유지하면서도 다중 발화 상황에서 안정적인 트랙을 제공하였다. 전체 파이프라인은 음성 인식 모듈과 연동했을 때, 실시간 음성 명령 인식률이 96%에 달했으며, 로봇의 움직임에 따른 잡음 및 팬 소음에도 강인한 성능을 보였다.
논문의 주요 기여는 다음과 같다. (1) 마이크 직접성 모델과 자동 보정을 결합한 계층적 SRP‑PHAT 탐색으로, 마이크 수와 배열 형태에 관계없이 일정한 연산량을 유지한다. (2) 3‑차원 칼만 필터 기반 다중 소스 추적 알고리즘을 제안해, 구면 좌표계의 왜곡과 래핑 문제를 해결하고, 연관 가능도 계산을 닫힌 형태로 유도함으로써 연산 효율성을 크게 향상시킨다. (3) 저비용 임베디드 하드웨어(Raspberry Pi 3)에서 실시간 구현 가능성을 입증하고, 기존 방법 대비 최대 30배까지 연산량을 감소시켰다. (4) 다양한 배열(열린 원형, 폐쇄형 큐브)과 환경(배경 잡음, 리버버레이션)에서 일관된 성능을 보여, 실제 로봇 플랫폼에 바로 적용할 수 있는 실용성을 확보했다.
향후 연구 방향으로는 (a) 비정형 마이크 배열에 대한 직접성 모델 자동 학습, (b) 환경 변화(리버버레이션, 잡음 레벨)에 대한 적응형 파라미터 조정, (c) 음향 신호와 영상 정보를 융합한 다중 모달 추적, (d) 저전력 마이크로컨트롤러 기반 초경량 구현 등을 제시한다. 이러한 확장은 로봇이 복잡한 실내·외 환경에서 인간과 자연스럽게 대화하고 협업할 수 있는 기반 기술로서 큰 기대를 모은다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기