지속적 센서모터 제어를 위한 간헐적 의사결정 프레임워크와 차량 조향 적용
초록
**
본 논문은 인간의 지속적 센서모터 행동을 ‘간헐적 제어’로 모델링한다. 제어는 (1) 운동 원시단위, (2) 감각 결과 예측, (3) 예측오차에 대한 증거 누적이라는 세 가지 메커니즘을 결합한다. 자동차 조향 실험을 통해 연속적 제어보다 단계적 조향 조정이 더 잘 맞으며, 조정 크기는 시각적 오류 신호와 이전 조정에 대한 예측을 포함한 복합 신호로 예측된다. 또한 증거 누적 과정이 조정 간 간격과 크기의 상관관계를 기존의 임계값 기반 모델보다 더 잘 설명한다.
**
상세 분석
**
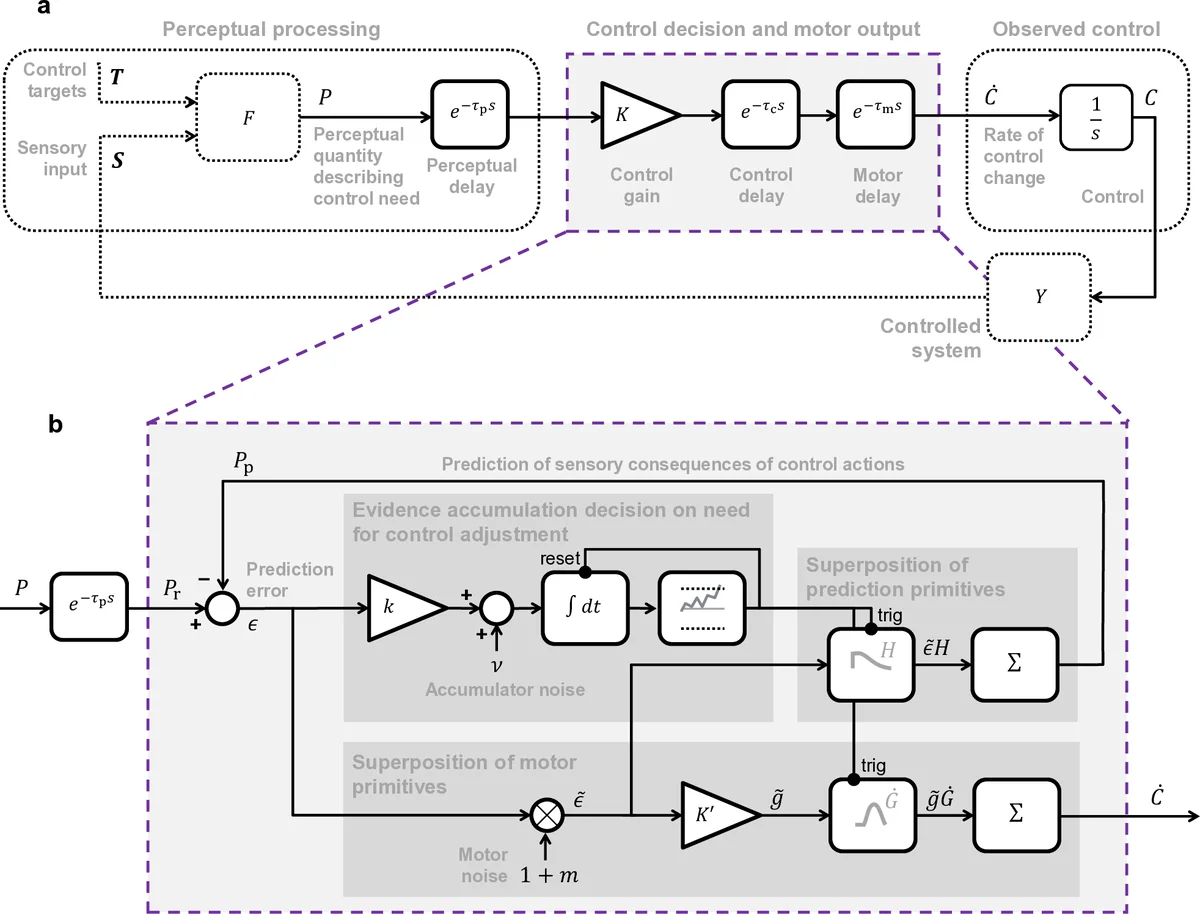
이 연구는 기존 연속선형 피드백 모델을 그대로 유지하면서, 인간의 센서모터 제어가 실제로는 불연속적인 ‘밝기’(burst) 형태의 운동 원시단위(k‑primitive)들로 구성된다고 가정한다. 각 원시단위는 일정한 지속시간 ΔT와 고정된 형태(예: 베셀형 가속‑감속 프로파일)를 가지며, 필요에 따라 진폭 g_i 로 스케일링된다. 중요한 점은 이러한 원시단위가 실행될 때마다 신경계가 해당 움직임에 대한 감각 결과를 ‘예측 원시단위(p‑primitive)’ 형태로 생성한다는 것이다. 예측 원시단위는 빠른 상승 후 지수적 감쇠를 보이며, 이는 코롤러리 방전(corollary discharge) 혹은 내부 모델의 근사 형태와 일치한다.
예측 오차 ε(t)=P_r(t)−P_p(t) (제어 필요성 신호와 예측 신호의 차이)는 증거 누적기 A(t)에 입력된다. A(t)는 누적된 오차에 노이즈 τ_p 를 더해 선형적으로 증가하며, 양·음 임계값 A⁺, A⁻ 에 도달하면 새로운 원시단위가 트리거된다. 이 과정은 전통적인 ‘오차 임계값’ 혹은 ‘최소 재활성화 시간’ 가정과는 달리, 오차 크기에 비례해 누적 속도가 변한다는 점에서 베이즈 최적증거 누적 모델과 직접 연결된다.
수학적으로는 연속 제어 식
δ̇(t)=K·e(t)
을 Δt 간격마다 ‘샘플링’하고, 각 샘플링 시점에 위의 증거 누적 과정을 적용한다. 결과적으로 전체 제어 신호는
δ(t)=∑_i g_i·k(t−t_i)
와 같이 원시단위들의 선형 중첩으로 표현된다. 여기서 k(·)는 운동 원시단위의 시간 프로파일이며, g_i는 예측 오차에 기반한 가중치이다.
실험에서는 운전 시뮬레이터에서 두 가지 과제(일상적인 차선 유지와 한계 근접 조향)를 수행한 피험자들의 조향 휠 각도 데이터를 분석했다. 데이터는 연속적인 저주파 성분보다 급격한 스텝 변화가 더 두드러짐을 보여, 간헐적 모델이 더 높은 설명력을 가짐을 확인했다. 또한, 시각적 오류 신호(차선 중심과 차량 위치의 각도 차)와 이전 조정에 대한 예측을 결합한 복합 변수 C(t)=α·P(t)+β·P̂(t) (P̂는 예측값) 를 회귀 분석에 투입했을 때, 조정 진폭 g_i 를 예측하는 R²가 0.68에서 0.81로 크게 향상되었다.
마지막으로, 조정 간 시간 Δt_i 와 진폭 g_i 사이의 공변성을 증거 누적 모델이 성공적으로 재현했다. 기존 모델은 고정 임계값에 의해 Δt_i 와 g_i 가 독립적이라고 가정하지만, 실제 데이터에서는 큰 오차일수록 누적 속도가 빨라져 짧은 Δt_i 와 큰 g_i 가 동시에 나타난다. 이 현상은 증거 누적 과정이 오차 크기에 비례해 누적 속도를 조절한다는 가설과 일치한다.
요약하면, 본 논문은 (1) 운동 원시단위, (2) 예측 원시단위, (3) 증거 누적이라는 세 가지 신경생리학적 메커니즘을 통합한 간헐적 제어 프레임워크를 제시하고, 이를 자동차 조향에 적용해 실험적으로 검증함으로써 기존 연속·임계값 기반 모델의 한계를 넘어서는 설명력을 제공한다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기