분산형 에피제네틱 로봇 군집을 이용한 형태 형성 및 자가 재생 알고리즘
초록
본 논문은 에피제네틱 트래킹(ET) 모델을 기반으로, 로컬 상호작용만으로 삼각 격자 구조를 이루는 로봇 군집이 임의의 2D 형태를 형성하고, 손상·분할 후에도 남은 로봇들만으로 축소된 형태를 자동 재생성하도록 하는 분산 알고리즘을 제안한다.
상세 분석
이 연구는 생물학적 세포 성장·재생 메커니즘을 로봇 군집에 적용하기 위해 에피제네틱 트래킹(ET)을 변형하였다. 입력으로 0·1 비트맵을 받아, 각 1에 해당하는 위치를 ‘태그(Tg)’, 내부·외부 구분 플래그(F), 그리고 6방향 이웃 수(NN)를 포함하는 1‑차원 벡터 형태의 ‘유전자(gene)’로 변환한다. 로봇은 이 유전자를 로컬 메모리에 저장하고, 삼각 격자(스큐 좌표계) 상에서 자신이 차지해야 할 위치와 요구 이웃 수를 파악한다.
알고리즘은 8가지 상태를 갖는 유한 상태 기계(DFA)로 설계되었으며, 주요 상태는 Queue, Search, Inactive, Active, Quasi, Stable, Danger, Leader이다. 초기에는 삼각형 꼭짓점에 해당하는 세 대의 시드 로봇을 배치하고, 하나는 Active(TS=1), 나머지는 Inactive(TS=2) 상태로 시작한다. 나머지 로봇은 Queue 상태에서 순차적으로 Search 상태로 전이하며, 현재 Active 로봇 중 최소 타임스텝(TS) 값을 가진 로봇 주변에 자신이 요구하는 NN 수를 만족하는 빈 좌표를 찾아 Occupy한다. TS 값은 로봇이 배치된 순서를 기록해, 후속 로봇이 앞선 로봇의 이웃 요구를 먼저 충족하도록 보장함으로써 구멍이나 불규칙성을 방지한다.
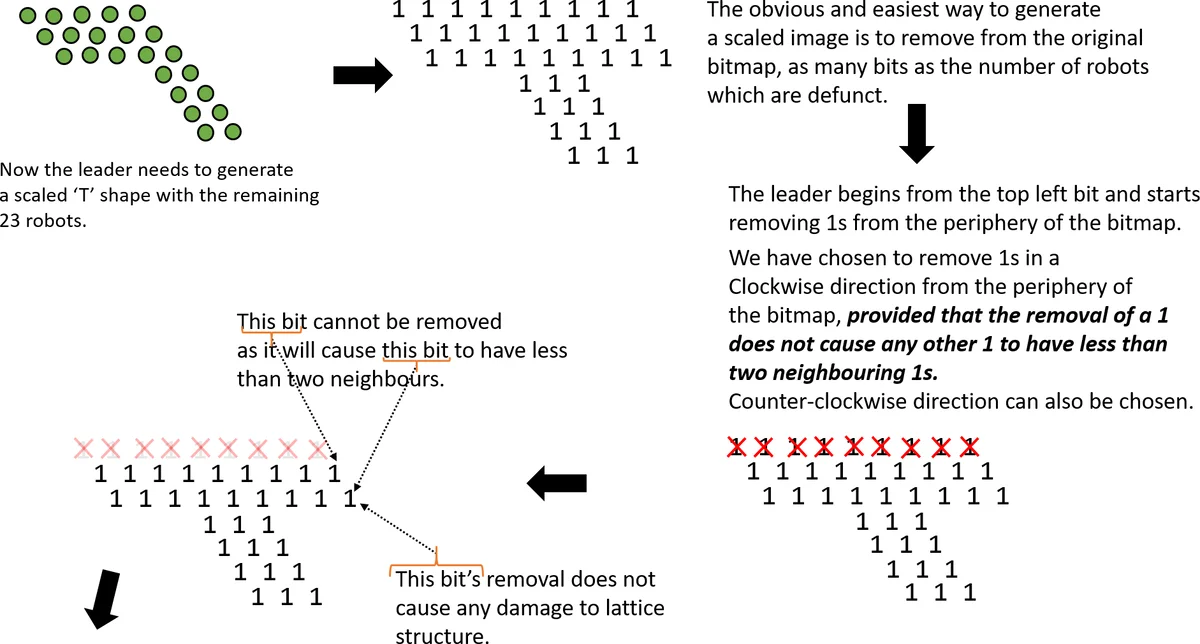
손상이 발생하면 각 로봇은 주변 이웃 수가 감소했는지를 지속적으로 감시한다. 이 변화를 Danger 상태로 전이시키고, 해당 클러스터는 Leader 로봇을 선출한다. Leader는 현재 남아 있는 로봇 수를 기반으로 축소 비율을 계산하고, 새로운 유전자를 재생성한다. 재생 과정에서도 동일한 TS‑기반 탐색·배치 메커니즘을 사용해, 손상된 영역을 메우는 대신 전체 형태를 비례 축소된 형태로 재구성한다.
시뮬레이션은 Kilombo(Kilobot) 환경에서 수행되었으며, 다양한 비트맵(‘T’, ‘U’, 복합형 등)과 다양한 손상 시나리오(절단, 랜덤 로봇 손실)에서 성공적인 형성·재생을 확인하였다. 알고리즘은 중앙 집중식 제어 없이 로컬 통신(IR)과 제한된 연산만으로도 복잡한 형태를 구현할 수 있음을 보여준다.
핵심 기여는 (1) ET 기반 유전자를 로봇에 적용한 형태 코딩 방법, (2) 삼각 격자와 TS‑기반 순차 배치를 통한 무구멍 형태 형성, (3) 손상 감지·클러스터 재구성을 통한 자동 축소 재생 메커니즘, (4) Kilobot 같은 저사양 플랫폼에서도 구현 가능한 경량 분산 프로토콜이다.
댓글 및 학술 토론
Loading comments...
의견 남기기