일본 주변 해저 대변위 GNSS‑A 관측 데이터 공개
초록
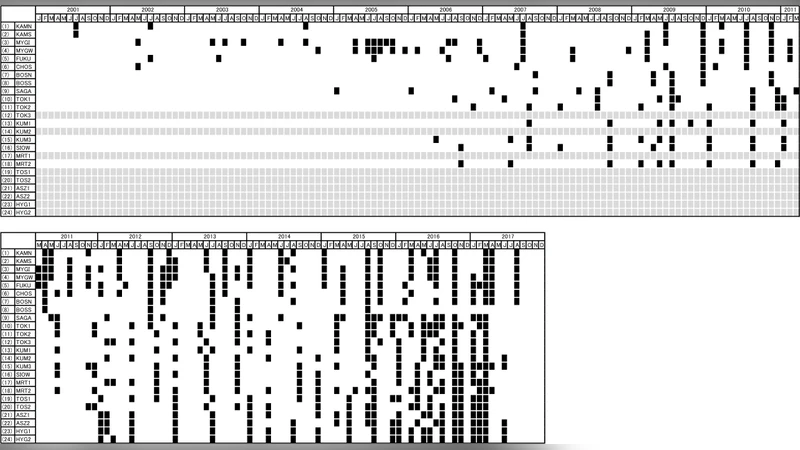
본 논문은 2001년부터 현재까지 일본 주변 주요 섭입대(Nankai, Sagami, Japan Trench)에서 수행한 GNSS‑A(전역위성시스템‑음향) 관측을 통해 얻은 해저 지각 변위 시계열 데이터를 정리·제공한다. 관측 장비·방법, 데이터 처리 흐름, 오류 특성 및 활용 가능성을 상세히 기술하고, 특히 2005년 미야기·오프오프와 2011년 동일본 대지진 전후의 급격한 변위를 포함한 고해상도 자료를 공개한다.
상세 분석
이 연구는 해저 지각 변형을 정밀하게 측정하기 위해 GNSS‑A 복합 기법을 장기간에 걸쳐 체계적으로 적용한 점이 가장 큰 특징이다. 기존 육상 GNSS·InSAR 네트워크가 제공하지 못하는 해저‑지각‑플레이트 경계의 직접적인 변위 정보를 제공함으로써, 섭입대의 장기적인 응력 축적·방출 과정을 보다 정확히 파악할 수 있다. 관측 시스템은 해저에 설치된 다중 음향 트랜스폰더와 선박에 탑재된 GNSS 안테나·음향 트랜스듀서·동적 모션 센서로 구성되며, 1990년대 중반부터 지속적으로 개선되어 왔다. 초기에는 8 m 알루미늄 폴을 사용해 선박이 표류하면서 측정했으나, 2002년 스테인리스 폴, 2008년 선체에 고정형 트랜스듀서로 전환하면서 측정 정확도와 효율이 크게 향상되었다.
데이터 처리 단계는 크게 두 부분으로 나뉜다. 첫째, 관측된 음향 왕복 시간과 GNSS‑A 위치 정보를 이용해 선형 최소제곱 반전(LSE)으로 해저 기준점(SP)을 추정한다. 이때 초기 모델 파라미터와 관측 벡터를 선형화하고, 반복적인 수치 최적화를 통해 수렴된 해저 위치와 공분산 행렬을 얻는다. 둘째, 해저 음향 전파에 영향을 미치는 해수음속 구조(SSS)를 보정하기 위해, 관측된 여행시간 데이터 자체에 내재된 SSS 정보를 활용한다. 시간에 따라 변하는 SSS 보정 함수를 베이시스 함수의 선형 결합으로 표현하고, SP 추정 결과와 연계하여 반복적으로 SSS를 업데이트한다. 이러한 두 단계의 순환은 센티미터 수준의 정밀도를 달성하는 핵심 메커니즘이다.
오류 원인은 크게 세 가지로 구분된다. (1) GNSS 자체 오류—대기·전리층 지연 및 위성 기하학에 의한 위치 불확실성, (2) 선박‑트랜스듀서 간 상대 위치 오류(G‑T 오류)—특히 초기 알루미늄 폴이 물 흐름에 의해 변형되면서 발생한 시스템적 편향, (3) 모션 센서 및 기타 계측 장비의 노이즈. 각 오류는 관측 장비 코드(A, B, C)와 선박 코드(T, S, M, K)로 메타데이터에 명시되어 있어, 후속 연구자가 오류 모델링 및 보정에 활용할 수 있다.
데이터는 ECEF 좌표계 기반의 절대 위치 시계열과, 첫 관측 시점을 기준으로 한 ENU(동‑북‑상) 상대 변위 두 형태로 제공된다. 파일명은 ‘_xyz.txt’와 ‘_enu.txt’로 구분되며, PANGAEA 데이터베이스를 통해 공개된다. 특히 2011년 동일본 대지진 전후의 급격한 변위를 포착한 일본 해구 구간 데이터는 별도 파일로 제공되어, 급변형 분석 및 지진파 전파 모델 검증에 바로 활용 가능하다.
이러한 데이터 세트는 섭입대의 장기적인 커플링 상태, 슬립 디펜시트, 그리고 급격한 공동진동(코-시즘) 변형을 정량화하는 데 필수적이다. 기존 연구(예: Ref. 15‑16, 18‑22)와 결합하면, 지진 발생 전후의 응력 재분배, 슬립 속도 변화, 그리고 잠재적 대규모 지진 발생 가능성을 시뮬레이션하는 데 중요한 입력값이 된다. 또한, 해양‑지진‑쓰나미 연계 모델링, 위험도 평가, 그리고 관측 네트워크 최적화에도 직접적인 활용이 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기