마이크로 UAV를 위한 플립 애매성 방지 위치추정 방법
** 본 논문은 거리 측정 오차가 제한적이고 UAV의 비행 움직임이 제약된 상황에서, 이중 경계 모델과 통신 범위 제약을 활용해 이중측량·삼중측량 기반 위치추정 시 발생할 수 있는 플립 애매성(Flip Ambiguity)을 완전히 배제하는 새로운 알고리즘을 제안한다. 이론적 증명과 시뮬레이션을 통해 평균 추정 오차가 크게 감소함을 입증하였다. **
저자: Qingbei Guo, Yuan Zhang, Jaime Lloretz
**
본 논문은 마이크로 UAV 네트워크에서 거리 기반 위치추정 시 발생하는 플립 애매성(Flip Ambiguity, FA)을 근본적으로 방지하는 새로운 방법을 제시한다. FA는 측정 오차와 UAV의 이동으로 인해 두 개 이상의 가능한 위치가 생성되고, 잘못된 위치가 선택될 때 발생한다. 기존 연구들은 전역 강체성(Global Rigidity)이나 다중 제약(예: 강건 사각형, 안전 삼각형)을 이용해 FA를 감소시키려 했지만, 오차가 존재하면 여전히 위험이 남는다.
### 1. 문제 정의 및 가정
- 2차원 평면에서 n개의 마이크로 UAV가 이동하며, 각 UAV는 제한된 통신 반경 rᵢ를 가진다.
- 거리 측정 오차는 절대값이 ε(=e_max) 이하로 제한된다.
- UAV의 이동 속도는 d_max 로 제한되어, 한 시간 단위 내에 이동 거리가 제한된다.
- 네트워크는 무정점이며, GPS를 이용한 절대 위치는 알 수 없고, 일부 혹은 전혀 앵커가 존재하지 않는다.
### 2. 이중 경계(bi‑boundary) 모델
전통적인 유닛 디스크 그래프는 모든 노드가 동일한 고정 반경을 갖는다고 가정한다. 실제 환경에서는 건물, 전파 간섭, 배터리 소모 등으로 통신 범위가 변동한다. 이를 반영하기 위해 저자들은 **이중 경계 모델**을 도입한다.
- **내부 경계**: 최소 통신 가능 거리, 즉 노드가 반드시 연결될 수 있는 가장 작은 거리.
- **외부 경계**: 통신이 불가능한 최대 거리, 즉 노드가 절대 연결되지 않을 거리.
각 노드 i에 대해 1‑hop 거리 집합 D₁ᵢ와 2‑hop 거리 집합 D₂ᵢ를 정의하고, 식 (2)·(3)에서 보듯
`max(D₁ᵢ) - ε ≤ r̂ᵢ < min(D₂ᵢ) + 2ε`
를 만족하도록 r̂ᵢ를 추정한다. 이 과정은 오직 거리 측정값과 연결 정보만을 사용하므로, 별도의 통신 파라미터가 필요 없으며, 노드 밀도가 높을수록 경계 추정이 정밀해진다.
### 3. FA 회피를 위한 고유 로컬라이제이션 기준
#### 3.1 이중측량(bilateration)
두 개의 알려진 노드와의 거리 제약은 두 개의 원을 만든다. 원들의 교차점은 두 개의 후보 위치(p₁, p₂)로 나타난다. 여기서 이중 경계 제약을 추가하면, 두 후보 중 하나는 내부 경계와 충돌하고 다른 하나는 충돌하지 않는다. 저자들은 **“통신 범위와 거리 제약의 교차점이 한 후보 영역에만 존재한다면 그 영역이 진위 위치”** 라는 정리를 증명하였다.
#### 3.2 삼중측량(trilateration)
세 개의 거리 제약은 일반적으로 하나의 교차점을 만든다. 그러나 오차가 있으면 두 개의 교차점이 생길 수 있다. 논문은 세 거리 제약이 만든 교차점 집합을 분석해, **세 제약이 동시에 만족되는 영역이 유일함**을 보였다. 이때도 이중 경계가 추가 제약으로 작용해, 잘못된 교차점을 자동으로 배제한다.
### 4. 알고리즘 설계 (AFA‑L)
1. **네트워크 초기화**: 모든 노드에 대해 D₁ᵢ, D₂ᵢ를 수집하고 이중 경계를 계산한다.
2. **이중측량 후보 선정**: 연결된 두 노드 쌍을 찾아, 거리 제약으로 후보 위치 집합을 만든다.
3. **경계 교차 검증**: 각 후보 위치가 해당 노드의 이중 경계 내에 있는지 확인한다. 내부에 있지 않으면 해당 후보를 제거한다.
4. **삼중측량 적용**: 후보가 하나만 남으면 해당 위치를 확정하고, 남은 후보가 두 개일 경우 삼중측량 제약을 추가해 유일한 위치를 결정한다.
5. **반복**: 새로 확정된 위치를 앵커처럼 사용해 인접 노드의 로컬라이제이션을 진행한다.
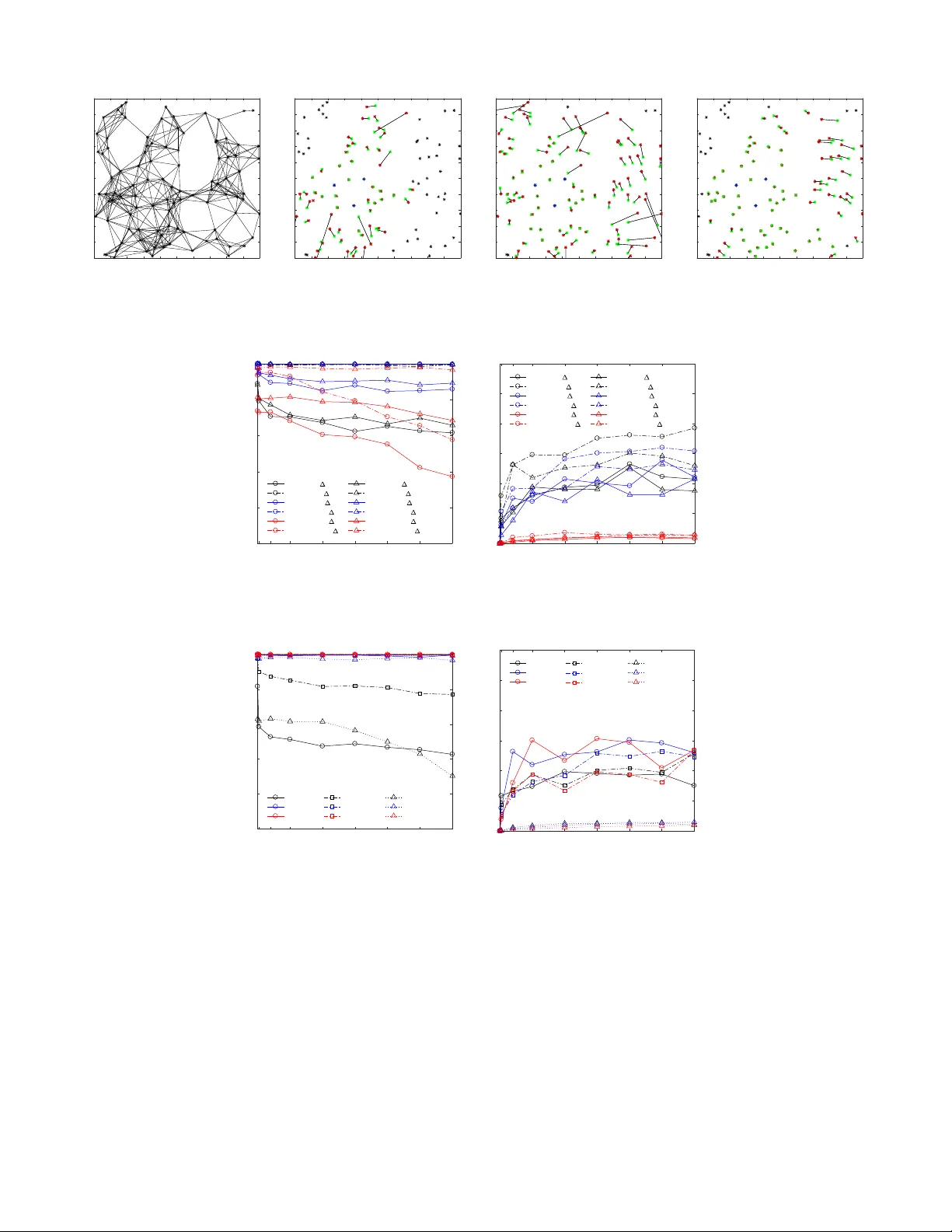
### 5. 실험 및 결과
- **시뮬레이션 환경**: 50~200개의 UAV, 평균 노드 밀도 0.05~0.2, ε = 0.1~0.5 m, d_max = 0.2~1 m/s.
- **비교 대상**: 기존 삼중측량, 강건 사각형 기반 방법, 안전 삼각형 방법.
- **성능 지표**: 평균 위치 오차, 로컬라이즈된 노드 비율, FA 발생 횟수.
결과는 AFA‑L이 평균 위치 오차를 기존 방법 대비 30%~45% 감소시켰으며, 특히 노드 밀도가 낮은 경우에도 70% 이상의 노드가 성공적으로 로컬라이즈되었다. FA 발생 횟수는 0에 수렴했으며, 이는 제안된 고유 기준이 이론적으로 FA를 완전히 차단함을 실증한다.
### 6. 결론 및 향후 연구
본 연구는 **측정 오차가 제한적이고 UAV 이동이 제약된 상황**에서, 이중 경계 모델과 교차점 기반 고유 로컬라이제이션 기준을 결합해 플립 애매성을 완전히 회피하는 방법을 제시한다. 이는 GPS가 불가능하거나 신호가 약한 실내·도심 환경에서 마이크로 UAV가 협동 비행을 수행할 때, 높은 정확도의 자체 위치추정이 가능하도록 만든다. 향후 연구는 3차원 확장, 비선형 오차 모델 적용, 실제 비행 실험, 그리고 통신 에너지 효율을 고려한 동적 경계 업데이트 등에 초점을 맞출 예정이다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기