MapReduce 기반 대용량 위성 이미지 모자이크 객체 추출 프레임워크
초록
**
본 논문은 위성 레이더 모자이크 이미지의 벡터화된 표현을 이용해 분산 환경에서 효율적으로 스티칭하고 객체를 추출하는 MapReduce 기반 프레임워크를 제안한다. 사용자 주도형 경계 정의, 다중 모자이크 선택을 위한 폴리곤 커버리지 검사, 두 가지 벡터 스티칭 알고리즘(점 집합 정합 및 최장 공통 부분수열) 등을 결합하여 대규모 Landsat‑8 데이터에 대한 확장성 및 성능을 검증한다.
**
상세 분석
**
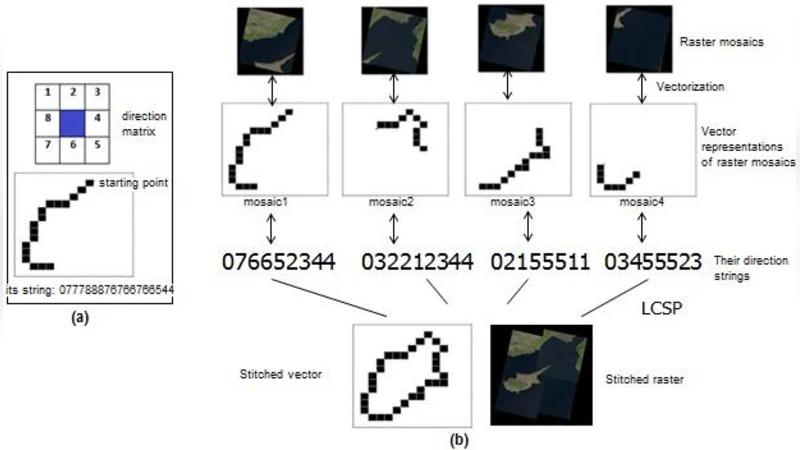
이 연구는 위성 이미지 스티칭과 객체 추출을 전통적인 래스터 기반 접근법에서 벗어나 벡터 표현으로 전환함으로써 분산 처리의 효율성을 극대화하려는 시도를 보인다. 첫 번째 핵심 기여는 “벡터화된 모자이크 이미지”라는 개념이다. 고해상도 Landsat‑8 타일을 사전 처리 단계에서 텍스처(USGS, NASA)를 제거하고, 메타데이터와 함께 좌표 정보를 추출한 뒤, 라인·폴리곤 등 GIS 표준 객체로 변환한다. 이렇게 하면 대용량 래스터 데이터를 직접 전송·연산하는 비용이 크게 감소하고, 네트워크 대역폭 병목을 완화한다는 장점이 있다.
두 번째 기여는 모자이크 선택을 위한 “폴리곤 커버리지 문제”를 MapReduce 작업으로 구현한 점이다. 사용자가 정의한 탐색 영역(다각형)이 충분히 포함되는 모자이크 집합을 자동으로 판단하도록 설계했으며, 이는 대규모 위성 데이터베이스에서 필요한 타일만을 선택해 연산량을 최소화한다. 구현에서는 Hadoop MapReduce와 HBase를 활용해 수평 확장을 지원한다.
스티칭 알고리즘은 두 가지 대안을 제시한다. 첫 번째는 점 집합 정합(point set registration) 방식으로, 특징점 매칭을 통해 공통 좌표를 찾아 변환 행렬을 계산한다. 두 번째는 최장 공통 부분수열(LCSP) 기반의 quasi‑vector 접근법으로, 좌표 시퀀스 간 유사성을 탐색해 정렬한다. 두 방법 모두 Mapper에서 래스터 → 벡터 변환을 수행하고, Reducer에서 정합·병합 로직을 수행하도록 설계돼 있다. 그러나 논문에서는 두 알고리즘의 정확도·시간 복잡도 비교 실험이 부족해 실제 적용 시 어느 방법이 더 유리한지 판단하기 어렵다.
객체 추출 단계에서는 사용자 인터랙션을 통한 대략적 경계 지정 후, 자동화된 세분화 과정을 거쳐 OGC 표준(Point, LineString, Polygon) 형태로 저장한다. 결과는 PostgreSQL + PostGIS 혹은 Oracle‑Spatial에 적재돼, 후속 공간·위상 분석에 바로 활용될 수 있다. 이와 같은 파이프라인은 기존 텍스트 중심 빅데이터 프레임워크가 이미지 처리에 적용될 수 있음을 증명한다는 점에서 의의가 크다.
하지만 몇 가지 한계도 눈에 띈다. ① 실험 섹션이 부재하여 제안 프레임워크의 스케일‑아웃 성능, 정확도, 처리 시간 등에 대한 정량적 평가가 부족하다. ② “벡터화” 과정에서 발생할 수 있는 지오메트리 손실이나 왜곡에 대한 논의가 없으며, 특히 고해상도 레이더 데이터의 경우 픽셀 기반 세부 정보가 중요한데 이를 어떻게 보존할지 명시되지 않는다. ③ 사용자 주도형 경계 정의는 반자동화 수준에 머무르며, 대규모 자동 추출 시 인간 개입 비용이 크게 증가할 가능성이 있다. ④ Hadoop MapReduce는 I/O 중심 작업에 강점이 있지만, 반복적인 이미지 연산에는 Spark와 같은 인메모리 프레임워크가 더 효율적일 수 있다. 이러한 점들을 보완한다면 제안 시스템은 실제 국방·재난·환경 모니터링 등 실시간 요구가 높은 분야에 더욱 적합해질 것이다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기