높이 필터링과 지속성 다이어그램을 이용한 평면 그래프 복원
초록
본 논문은 평면에 임베딩된 단순 그래프(정점과 직선 변만 포함)를 제한된 수의 높이 필터링에 대한 지속성 다이어그램으로부터 복원하는 알고리즘을 제시한다. 세 개의 방향으로부터 정점 위치를 O(n log n) 시간에 찾고, O(n²)개의 추가 다이어그램을 이용해 모든 변을 결정한다. 이는 무한히 많은 방향을 요구하던 기존 PHT 결과를 유한하고 다항시간으로 제한한 최초의 작업이다.
상세 분석
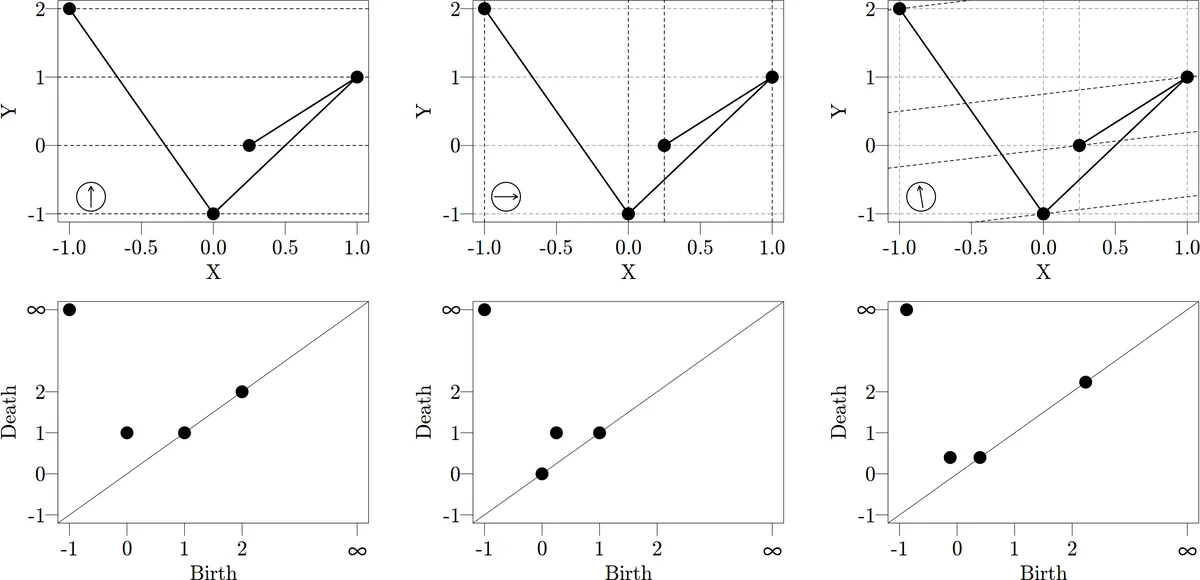
논문은 Topological Data Analysis(TDA)의 핵심 도구인 지속성 다이어그램을 활용해, 2차원에 직선 임베딩된 평면 그래프(plane graph)를 복원하는 새로운 이론적·알고리즘적 프레임워크를 제시한다. 기존 연구인 Persistent Homology Transform(PHT)는 모든 가능한 방향(단위 원 S¹)의 높이 필터링을 필요로 하여 실용적인 적용에 한계가 있었다. 저자들은 이 문제를 두 단계로 나누어 해결한다. 첫 번째 단계는 정점 복원이다. 높이 필터링에 대한 0차 지속성 다이어그램의 birth 점은 정점과 일대일 대응한다는 사실을 이용해, 임의의 방향 s에 대해 각 정점의 높이 hₛ(v)=max_{u∈v} u·s를 구한다. 이 높이에 수직인 직선을 “필터링 라인”이라 정의하고, 같은 방향의 모든 정점에 대해 평행한 라인 집합 L(s,V)를 만든다. 두 개의 서로 선형 독립인 방향 s₁, s₂에 대해 각각 L(s₁,V)와 L(s₂,V)를 구하면, 이 라인들의 교차점 집합 A는 정점 후보가 된다. 여기서 세 번째 방향 s₃를 선택하는데, s₃는 s₁과 s₂가 만든 최소 경계 상자 B 안에서 각 라인이 B를 지나면서 A와 정확히 한 점만 교차하도록 설계된다(Lemma 4). 이렇게 하면 A와 L(s₃,V)의 교차점이 정확히 원래 정점 위치와 일치함을 보이며, 정점 좌표를 O(n log n) 시간에 복원한다(정렬 단계 포함). 두 번째 단계는 변 복원이다. 각 정점 v와 방향 s에 대해 “indegree(v,s)”를 정의한다. 이는 방향 s에 대해 v보다 낮은 높이에 있는 인접 정점의 수이며, 이는 0차와 1차 지속성 다이어그램에서 v·s에 해당하는 death와 birth의 개수 합으로 정확히 계산된다(Lemma 7). 따라서 모든 정점 쌍에 대해 충분히 많은 방향(최악 O(n²)개)의 다이어그램을 수집하면, 각 정점의 indegree를 통해 존재하는 변을 판별할 수 있다. 전체 알고리즘은 정점 복원에 3개의 다이어그램, 변 복원에 O(n²)개의 다이어그램을 사용하며, 시간 복잡도는 정점 단계 O(n log n), 변 단계 O(n³) (다이어그램 계산 포함) 정도로 다항시간이다. 주요 가정은 정점이 일반 위치(general position)에 놓여 있어 x·s와 y·s가 중복되지 않으며, 변이 직선으로 표현된다는 점이다. 이 가정 하에 알고리즘은 정확성과 완전성을 보장한다. 논문은 또한 PHT와 Radon 변환 사이의 관계를 언급하며, 방향 수를 기하학적으로 제한하는 첫 번째 실용적 결과임을 강조한다. 이 작업은 TDA를 이용한 형태 복원, 로봇 경로 계획, 의료 영상 등에서 제한된 관측(예: 몇 개의 스캔 방향)만으로도 정확한 구조를 복원할 수 있는 가능성을 열어준다.
댓글 및 학술 토론
Loading comments...
의견 남기기