UML 활동 모델 기반 자동 결함 트리 변환 방법
초록
본 논문은 UML 활동 다이어그램의 제어 흐름을 명제 논리와 확률 이론을 활용해 동등한 결함 트리(Fault Tree)로 변환하는 형식적 방법을 제시한다. 변환 과정에서 Fault Propagation Chain을 도입하고, 메타모델을 통해 모델 간 변환을 구조화한다. 교통 관리 시스템을 사례로 적용해 방법의 실효성을 검증하고, 객체 흐름·상태 머신·기능 할당으로 확장할 가능성을 논의한다.
상세 분석
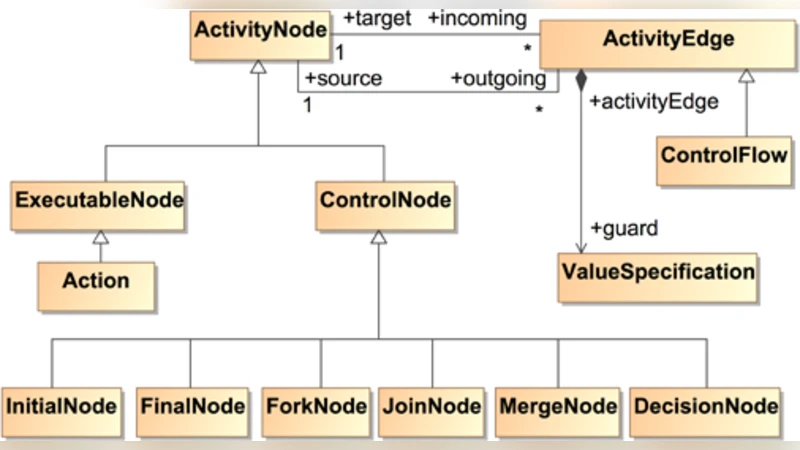
이 논문은 시스템 개발 초기 단계에서 결함 분석을 자동화하기 위한 형식적 변환 프레임워크를 제안한다. 핵심 아이디어는 UML 활동 모델의 제어 흐름을 논리식으로 정형화하고, 이를 기반으로 Fault Tree의 기본 게이트(AND, OR, NOT)와 이벤트를 생성하는 것이다. 이를 위해 저자는 먼저 활동 노드와 흐름을 명제 변수에 매핑하고, 흐름 연결을 논리 연산자로 표현한다. 예를 들어, 순차 흐름은 논리적 AND, 선택 흐름은 OR로 변환된다. 이러한 변환 규칙은 명제 논리의 진리표와 일치하도록 설계되어, 변환된 Fault Tree가 원본 모델의 동작 의미를 보존한다는 점이 강점이다.
또한 확률 이론을 도입해 각 기본 이벤트에 고장 확률을 할당하고, Fault Tree 분석을 통해 시스템 수준의 고장 확률을 계산한다. 이 과정에서 Fault Propagation Chain(FPC)이라는 중간 구조를 사용한다. FPC는 활동 간 고장 전파 경로를 그래프 형태로 나타내며, 복잡한 제어 흐름(루프, 병렬 실행 등)을 단계별로 분해해 변환의 정확성을 높인다. 저자는 FPC를 메타모델의 한 요소로 정의하고, UML 메타모델, FPC 메타모델, Fault Tree 메타모델 간의 변환 규칙을 OCL(Object Constraint Language) 기반으로 기술한다.
논문의 실험은 교통 관리 시스템‑시스템즈(Traffic Management System of Systems) 사례를 통해 수행된다. 해당 시스템의 활동 모델을 변환한 결과, 생성된 Fault Tree는 시스템의 주요 고장 모드와 그 상호 의존성을 명확히 드러냈으며, 확률 계산 결과는 기존 수동 분석과 일치하였다. 이는 제안된 방법이 실제 복합 시스템에 적용 가능함을 입증한다.
한계점으로는 현재 객체 흐름(데이터 흐름)과 상태 머신을 직접 다루지 못한다는 점, 그리고 루프 구조의 변환이 근사화에 의존한다는 점을 지적한다. 향후 연구에서는 객체 흐름을 이벤트 기반 모델로 확장하고, 상태 머신의 전이 조건을 논리식으로 매핑하는 방안을 제시한다. 또한 자동화 도구 구현과 대규모 시스템에 대한 성능 평가가 필요하다.
전반적으로 이 논문은 모델 기반 시스템 엔지니어링(MBSE)과 신뢰성 공학을 연결하는 중요한 교량 역할을 하며, 형식적 변환을 통한 결함 트리 자동 생성이라는 실용적 가치를 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기