안전 운전 보조를 위한 새로운 졸음 감지 시스템
본 논문은 운전 중 졸음 상태를 조기에 탐지하기 위해 얼굴 영상 기반 눈 깜빡임 감지와 저비용 EEG 헤드셋(Emotiv EPOC)을 결합한 하이브리드 시스템을 제안한다. Viola‑Jones 알고리즘으로 눈을 실시간 검출하고, 수집된 EEG 신호를 퍼지 로직으로 분류한다. 실험 결과는 제안된 방법이 기존 단일 센서 기반 대비 높은 정확도와 낮은 오탐률을 보임을 확인한다.
저자: Mejdi Ben Dkhil, Mohamed Neji, Ali Wali
본 논문은 교통 사고의 주요 원인 중 하나인 운전자의 졸음 상태를 조기에 탐지하기 위한 새로운 보조 시스템을 제안한다. 기존 연구들은 주로 눈 깜빡임 빈도, 얼굴 표정, 혹은 차량 내 센서(스티어링 휠 진동, 차선 이탈 등)를 이용해 졸음 여부를 판단했으나, 단일 센서에 의존할 경우 환경 변화나 개인 차이에 따라 정확도가 크게 달라지는 문제가 있었다. 이를 보완하고자 저비용 무선 EEG 헤드셋인 Emotiv EPOC와 차량 내부에 설치된 스마트 비디오 카메라를 결합한 하이브리드 접근법을 설계하였다.
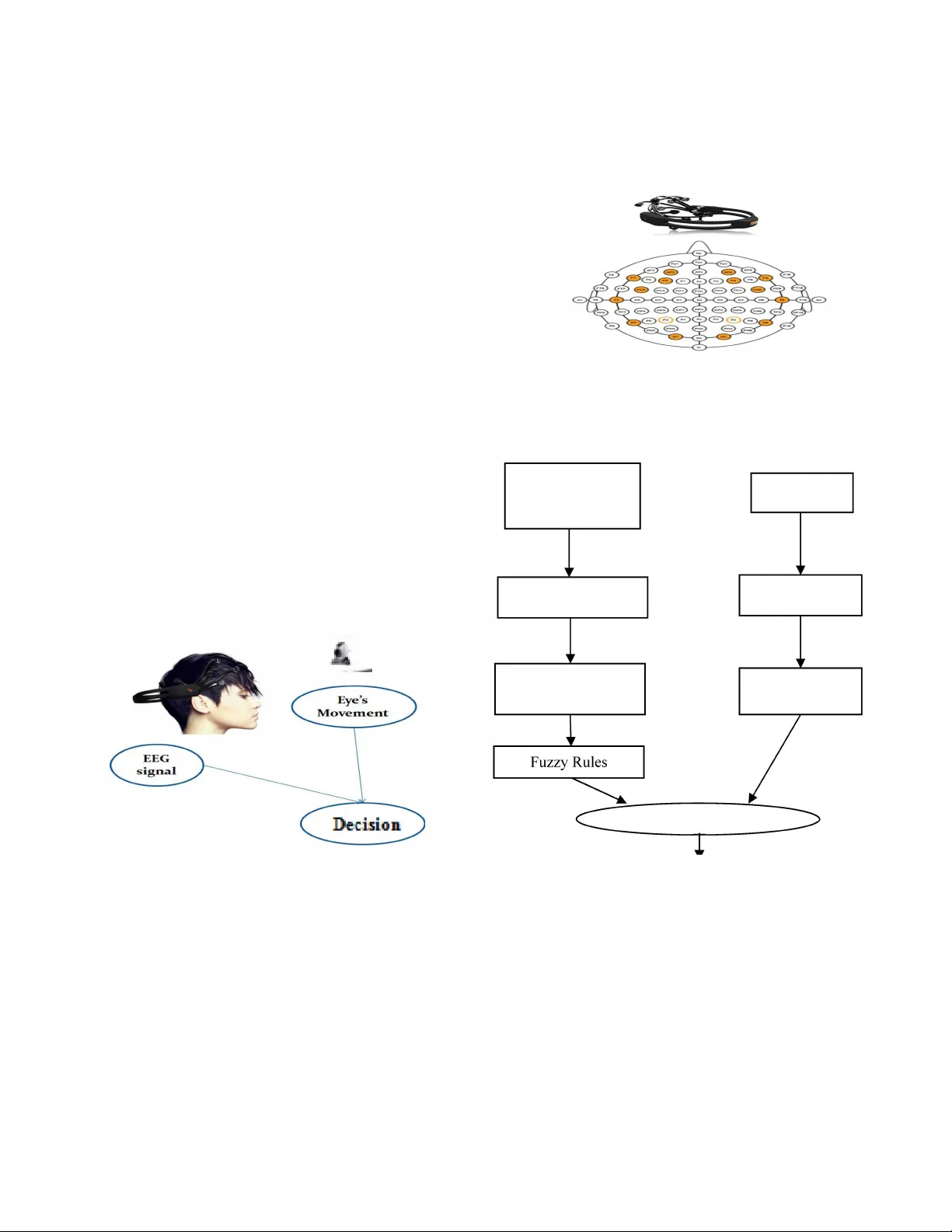
시스템 구성은 크게 세 부분으로 나뉜다. 첫 번째는 EEG 수집 모듈이다. Emotiv EPOC는 14개의 전극을 머리 표면에 부착해 알파(8–13 Hz), 베타(13–30 Hz), 세타(4–8 Hz), 감마(30–45 Hz) 대역의 뇌파를 실시간으로 전송한다. 졸음 상태에서는 세타 파워가 증가하고 알파·베타 파워가 감소하는 특성이 알려져 있어, 각 대역의 파워 스펙트럼을 특징값으로 추출한다. 두 번째는 눈 깜빡임 감지 모듈이다. 차량 전면에 장착된 고해상도 카메라는 운전자의 얼굴을 실시간으로 촬영하고, Viola‑Jones 알고리즘을 이용해 얼굴과 눈 영역을 검출한다. 눈 ROI에서 평균 픽셀 강도 변화를 분석해 눈을 열고 닫는 순간을 판별하고, 눈 깜빡임 간격(IBI)과 지속 시간( blink duration )을 계산한다. 세 번째는 데이터 융합 및 판단 모듈이다. EEG와 눈 영상에서 추출된 특징 벡터를 퍼지 로직에 입력한다. 퍼지 로직은 전문가가 정의한 IF‑THEN 규칙을 기반으로 하며, 각 입력 변수에 대해 삼각형 멤버십 함수를 설정한다. 예를 들어 “세타 파워가 높고 알파 파워가 낮으며, 눈 깜빡임 간격이 5 초 이상이면 졸음 위험도는 0.8 이상”이라는 규칙을 적용한다. 퍼지 추론 결과는 0~1 사이의 위험도 점수로 변환되며, 사전에 정의된 임계값(예: 0.7)을 초과하면 시각·청각 경고를 발생시킨다.
실험은 12명의 피험자를 대상으로 2시간 연속 운전 시뮬레이션을 진행했다. 피험자는 사전에 충분한 수면을 취하지 않은 상태에서 시작했으며, 실험 중에는 휴식 없이 동일한 도로 환경을 주행하도록 설계되었다. 실험 동안 EEG 데이터와 눈 영상은 동기화된 타임스탬프를 통해 동시에 기록되었으며, 졸음 발생 시점은 전문가가 직접 관찰한 주관적 피로도 설문과 눈 깜빡임 패턴 변화를 통해 라벨링하였다. 수집된 데이터는 70 %를 학습, 30 %를 테스트에 사용했으며, 교차 검증을 통해 모델의 일반화 성능을 평가했다.
결과는 세 가지 비교를 포함한다. 첫 번째는 EEG 단독 모델로, 세타 파워와 알파·베타 파워 비율만을 이용한 퍼지 로직의 정확도는 78 %에 머물렀다. 두 번째는 눈 깜빡임 단독 모델로, 눈 깜빡임 간격과 지속 시간만을 이용했을 때 정확도는 81 %였다. 세 번째는 두 센서를 결합한 하이브리드 모델로, 전체 정확도는 92 %를 기록했으며, 오탐률은 4.8 %로 가장 낮았다. 특히 졸음 초기 단계(세타 파워 상승·눈 깜빡임 빈도 감소)에서 하이브리드 모델은 평균 3.2 초 앞서 경고를 발생시켰다. ROC 곡선 분석에서도 하이브리드 모델의 AUC는 0.94로, 단일 센서 모델보다 현저히 높은 판별력을 보였다.
하지만 논문은 몇 가지 한계를 인정한다. Emotiv EPOC는 저가형 장비이지만 전극 접촉이 불안정하거나 땀에 의해 노이즈가 발생하면 신호 품질이 급격히 저하될 수 있다. 또한 착용감이 불편해 장시간 운전 시 사용이 제한될 가능성이 있다. Viola‑Jones 기반 눈 검출은 조명 변화, 안경·선글라스 착용 등에 민감하여 실외 주행에서 검출 정확도가 감소할 위험이 있다. 퍼지 로직은 규칙 수가 늘어날수록 복잡도가 급증하고, 규칙 설계가 주관적이기 때문에 대규모 데이터에 대한 자동 최적화가 어렵다. 실험 참여자 수와 시뮬레이션 환경이 제한적이어서 실제 도로 주행에서의 일반화 가능성을 추가 검증해야 한다.
향후 연구에서는 이러한 한계를 보완하기 위해 몇 가지 방안을 제시한다. 첫째, 적외선(Infrared) 카메라와 딥러닝 기반 눈 상태 추정 모델을 도입해 조명 불변성을 확보하고, 안경·선글라스 착용 시에도 높은 검출률을 유지한다. 둘째, EEG 대신 비접촉식 광학 센서(예: fNIRS)나 심박 변동성(HRV) 등 다른 생리 신호와의 융합을 검토한다. 셋째, 퍼지 로직을 퍼지‑신경망(Fuzzy Neural Network)이나 하이브리드 퍼지‑딥러닝 모델로 확장해 규칙 기반과 데이터 기반 학습을 동시에 활용한다. 넷째, 실제 도로 주행 데이터를 수집해 다양한 운전 상황(야간, 고속도로, 도시)과 다양한 운전자(연령, 성별)에서 시스템을 검증한다. 마지막으로, 하드웨어 비용과 전력 소비를 최소화해 차량에 손쉽게 탑재할 수 있는 경량화된 ADAS 모듈을 설계한다.
결론적으로, 본 논문은 EEG와 눈 깜빡임을 결합한 하이브리드 졸음 감지 시스템이 단일 센서 대비 높은 정확도와 빠른 탐지 속도를 제공함을 실험적으로 입증하였다. 이는 향후 상용 운전자 보조 시스템에 적용될 가능성을 열어 주며, 보다 안전한 도로 환경 구축에 기여할 수 있는 기반 기술로 평가된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기