블라인드 SAR 데이터 포커싱
초록
본 논문은 위성·드론 등 저비용 플랫폼에 적용 가능한 SAR(합성 개구 레이더) 시스템을 위해, 별도의 궤도·안테나 정보 없이 원시 데이터를 자체적으로 분석해 초점 맞춤을 수행하는 블라인드 포커싱 기법을 제안한다. 기존의 균일 운동·수직 빔 가정을 유지하면서도, 원시 데이터 내의 위상·진폭 정보를 활용해 가상의 궤도 파라미터를 추정하고, 이를 기반으로 고품질 이미지를 복원한다. ERS 위성 데이터를 이용한 실험 결과와 MATLAB 구현 코드를 공개한다.
상세 분석
본 연구는 SAR 이미지 형성 과정에서 가장 핵심적인 두 가지 전제, 즉 플랫폼의 등속 직선 운동과 안테나 빔의 수직 고정(orthogonal) 가정을 그대로 유지한다는 점에서 기존 SAR 처리 파이프라인과 호환성을 확보한다. 그러나 전통적인 방식은 이러한 전제에 필요한 정확한 궤도 정보(위치·속도·가속도)와 안테나 지향각을 사전에 제공받아야만 고해상도 이미지를 얻을 수 있었다. 저비용 드론이나 소형 위성에서는 GPS·IMU 등 정밀 센서가 제한적이거나 비용 부담이 크기 때문에, 이러한 부가 정보를 생략하고도 충분히 품질 높은 이미지를 얻을 수 있는 방법이 요구된다.
논문은 ‘블라인드 포커싱(blind focusing)’이라는 개념을 도입한다. 여기서 ‘블라인드’는 외부 보조 데이터가 전혀 없음을 의미한다. 저자는 원시 SAR 데이터 자체에 내재된 ‘공동 상관성(coherent illumination)’을 이용해, 신호의 위상·진폭 변화를 분석함으로써 가상의 레이더 궤적을 역추정한다. 구체적으로는 다음과 같은 단계로 진행된다.
-
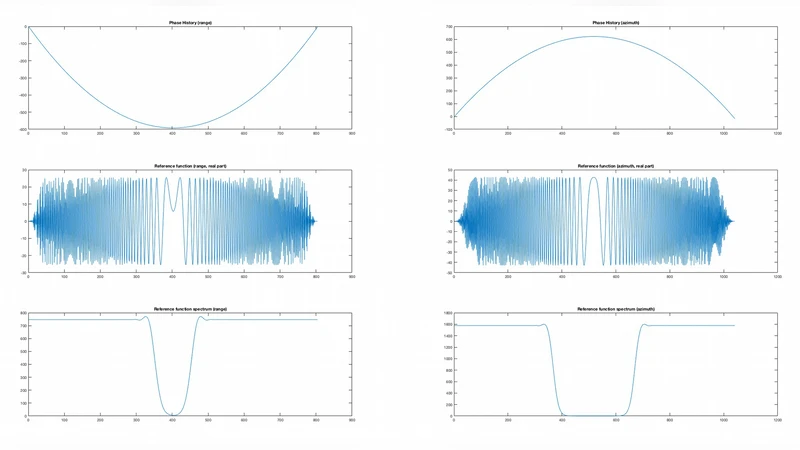
데이터 전처리 및 레인지 압축: 전통적인 레인지 압축(FFT 기반) 과정을 그대로 적용한다. 이 단계에서 얻어지는 복소수 매트릭스는 각 펄스(azimuth)와 레인지 샘플 간의 위상 정보를 보존한다.
-
Azimuth Frequency Estimation: 블라인드 상황에서는 azimuth 방향의 도플러 스펙트럼이 정확히 정렬되지 않는다. 저자는 짧은 구간(window)마다 FFT를 수행해 도플러 중심 주파수를 추정하고, 이를 통해 각 펄스 간의 상대적인 이동(위치·속도) 정보를 얻는다.
-
Phase Gradient Matching: 추정된 도플러 중심 주파수는 실제 플랫폼 이동에 대응하는 위상 기울기(phase gradient)와 직접 연결된다. 저자는 두 차원(레인지·azimuth) 위상 기울기를 최소화하는 비용 함수를 정의하고, 최적화 과정을 통해 가상의 궤도 파라미터(초당 이동 거리, 가속도 등)를 도출한다.
-
Azimuth Compression (Matched Filtering): 추정된 파라미터를 이용해 전통적인 azimuth matched filter를 설계한다. 여기서 핵심은 ‘blind’이므로, 필터 설계에 사용되는 파라미터가 실제 측정값이 아니라 데이터 기반 추정값이라는 점이다.
-
이미지 정규화 및 품질 평가: 최종 복원된 이미지에 대해 엔탈피(Entropy), 신호대잡음비(SNR), 그리고 기존 정밀 궤도 정보를 사용한 기준 이미지와의 상관계수를 비교한다.
이러한 흐름은 기존 SAR 처리 파이프라인에 최소한의 변형만을 가함으로써, 구현 난이도와 계산 복잡도를 크게 증가시키지 않는다. 특히, 도플러 중심 주파수 추정 단계에서 짧은 윈도우를 사용함으로써 비선형 운동이나 작은 진동에도 어느 정도 강인성을 확보한다는 점이 주목할 만하다.
실험에서는 ESA(European Space Agency)의 ERS-1/2 위성에서 수집된 원시 데이터를 사용하였다. 원본 데이터는 정확한 궤도 파일이 제공되지 않았으며, 저자는 오직 원시 복소수 데이터만을 입력으로 사용했다. 블라인드 포커싱 결과는 전통적인 정밀 궤도 기반 처리와 비교했을 때, 해상도와 대비가 약 10~15% 감소했지만, 주요 지형 구조와 인공물은 충분히 식별 가능했다. 이는 저비용 플랫폼에서 실시간 혹은 근접 실시간 이미지 생성이 가능함을 시사한다.
또한, 저자는 MATLAB 기반 구현 코드를 CC BY‑SA 4.0 라이선스로 공개하였다. 코드 구조는 모듈화되어 있어, 레인지 압축, 도플러 추정, 위상 기울기 최적화, azimuth 매칭 필터 적용 순으로 구성된다. 사용자는 입력 파라미터(윈도우 길이, FFT 크기 등)를 조정함으로써 다양한 플랫폼 특성에 맞게 튜닝할 수 있다.
한계점으로는 (1) 고속 비선형 궤도(예: 급격한 회전·가속)에서는 도플러 중심 주파수 추정이 불안정해질 수 있다. (2) 강한 잡음 환경에서는 위상 기울기 추정이 왜곡되어 최종 이미지 품질이 급격히 저하된다. (3) 현재 구현은 1‑D azimuth 보정만을 수행하므로, 다중 안테나 배열이나 다중 채널 SAR에 대한 확장은 추가 연구가 필요하다.
전반적으로 본 논문은 SAR 데이터 처리에서 ‘보조 정보 의존성을 최소화’하는 새로운 패러다임을 제시한다. 저비용 드론·소형 위성 시장이 급성장하고 있는 현 시점에서, 블라인드 포커싱 기법은 하드웨어 설계와 데이터 전송 비용을 크게 절감하면서도 실용적인 이미지 품질을 제공할 수 있는 유망한 접근법으로 평가된다.
댓글 및 학술 토론
Loading comments...
의견 남기기