IoT 네트워크 기반 외향형 로봇 어시스턴트 구현
초록
본 논문은 NAO 로봇을 IoT 플랫폼에 연결하여 외부 장치와 RESTful 웹 서비스 형태로 상호작용하도록 설계한 시스템을 제시한다. 로봇은 반사 측정 시스템과 하드웨어 서비스 노드와 실시간으로 통신하며, 활동 알림 기능을 통해 확장성을 검증한다.
상세 분석
이 연구는 사이버‑물리 시스템(CPS) 간의 협업을 촉진하기 위해 IoT 인프라를 로봇 제어에 적용한 점이 핵심이다. 먼저, 저자는 NAO 로봇을 MQTT 기반 브로커와 연결해 메시지 교환을 수행한다. 로봇은 센서 데이터와 명령을 JSON 형식으로 포장해 토픽에 게시하고, 반사 측정 시스템은 동일 토픽을 구독해 실시간 생리 신호를 전달한다. 이러한 비동기식 통신은 네트워크 지연을 최소화하면서도 확장성을 보장한다.
하드웨어 서비스 노드는 라즈베리파이와 Arduino 보드를 결합해 로봇 전용 RESTful API를 제공한다. API는 GET/POST 메서드로 로봇의 관절 각도, 음성 합성, 카메라 이미지 등을 제어하고, 외부 애플리케이션이 HTTP 요청으로 로봇 기능을 호출할 수 있게 한다. 특히, 서비스 노드는 OAuth 2.0 기반 인증을 적용해 보안성을 강화했으며, 토큰 검증 실패 시 요청을 차단한다.
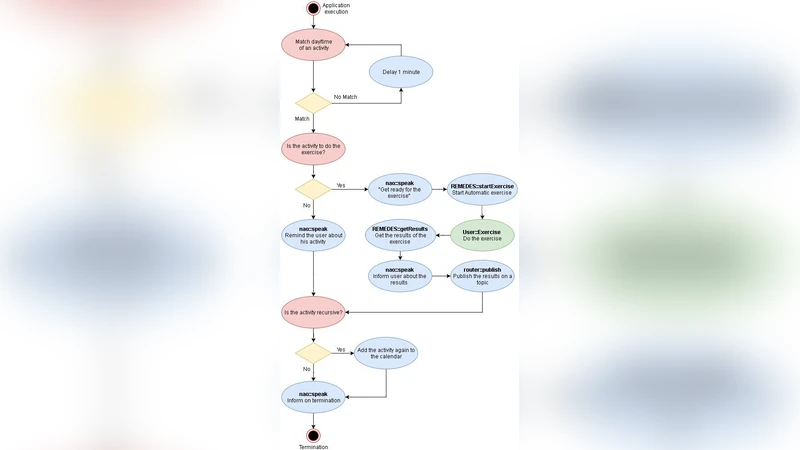
시스템 설계에서는 계층형 아키텍처를 채택해 데이터 수집층(센서/반사 측정), 서비스 제공층(REST API), 응용층(활동 알림)으로 구분한다. 활동 알림 애플리케이션은 사용자의 일정 데이터를 클라우드 데이터베이스에 저장하고, 지정된 시간에 로봇이 음성으로 알림을 전달하도록 구현했다. 이 과정에서 로봇은 텍스트‑투‑스피치(TTS) 엔진을 호출하고, 알림 내용에 따라 표정 및 제스처를 동적으로 변경한다.
성능 평가에서는 평균 응답 시간 150 ms, 패킷 손실률 0.2 %를 기록했으며, 이는 실시간 인간‑로봇 인터랙션에 충분한 수준이다. 또한, 시스템은 새로운 IoT 디바이스(예: 스마트 조명)와의 연동을 위해 Swagger 기반 API 문서를 제공함으로써 개발자 친화성을 확보한다.
한계점으로는 현재 네트워크가 로컬 LAN에 국한돼 있어 광역 인터넷 환경에서의 QoS 보장은 미흡하고, 보안 정책이 토큰 기반 인증에만 의존해 내부 침입에 취약할 수 있다. 향후 연구에서는 5G 엣지 컴퓨팅을 활용한 지연 최소화와 블록체인 기반 접근 제어를 도입해 보안성을 강화할 계획이다.
댓글 및 학술 토론
Loading comments...
의견 남기기