자율 지상 로봇을 위한 회전형 바이마이크로폰 3차원 실시간 음원 위치추정
본 논문은 회전 가능한 두 개의 마이크로폰을 이용해 인터얼 시간 차이(ITD)만으로 3차원 음원 방향과 거리까지 실시간으로 추정하는 방법을 제시한다. 상태공간 모델 기반 가시성 분석을 통해 고도 0°·90°에서 관측 불가능함을 밝혀내고, 이를 보완하기 위한 차이 기반 고도 추정 및 영-ITD 검출 기법을 설계하였다. EKF를 이용한 추정과 회전·이동 동작을 결합해 거리까지 측정하며, 시뮬레이션 및 실제 로봇 실험을 통해 성능을 검증하였다.
저자: Deepak Gala, Nathan Lindsay, Liang Sun
본 논문은 무인 지상 로봇이 회전 가능한 바이마이크로폰 어레이를 이용해 인터얼 시간 차이(ITD)만으로 3차원 공간에서 음원의 방위(azimuth, elevation)와 거리(distance)를 동시에 실시간으로 추정하는 새로운 방법을 제안한다. 연구는 크게 네 부분으로 구성된다.
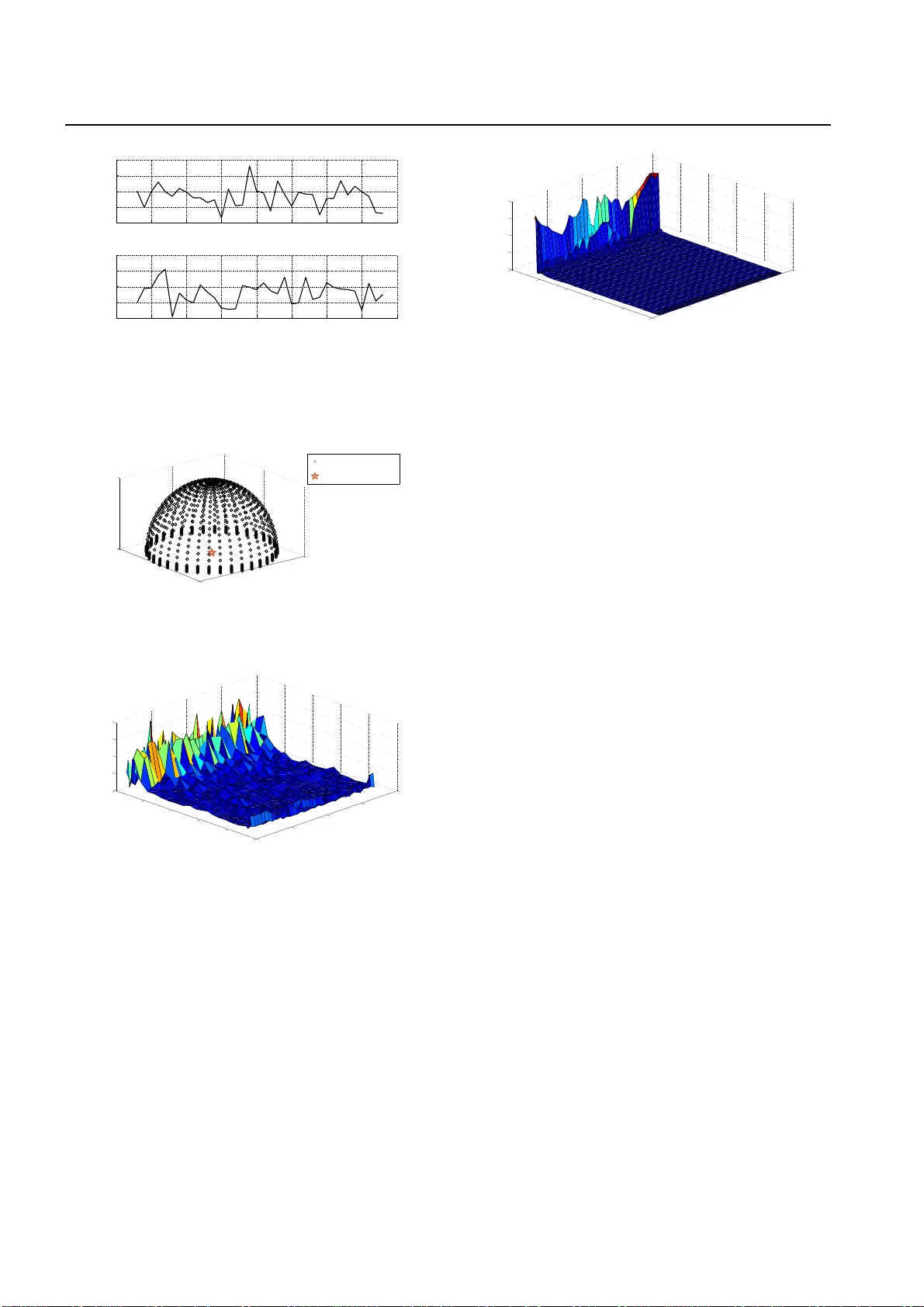
첫 번째는 시스템 모델링이다. 로봇 중심 O와 음원 S 사이를 구면 좌표 (D, θ, ϕ)로 표현하고, 마이크 간 거리 b와 회전 각속도 ω를 이용해 상태‑출력 관계를 수식화한다. 2D(θ=0)와 3D(θ∈
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기