가중치 할당으로 평면 커버링 반경 최소화
초록
이 논문은 평면 상의 n개의 점 집합 P와 k개의 양의 실수 가중치 W(k ≤ n)를 이용해, 각 가중치를 서로 다른 점에 할당함으로써 가중치 중심의 최대 가중 거리(즉, 커버링 반경)를 최소화하는 문제를 다룬다. 두 가지 알고리즘을 제시했으며, 첫 번째는 O(k²n²log³n) 시간, 두 번째는 O(k⁵n log³k + kn log³n) 시간 복잡도를 가진다. 특히 k가 상수일 때 두 번째 알고리즘은 거의 선형인 O(n log³n) 시간에 해결된다.
상세 분석
본 연구는 기존의 가중치 중심(Weighted Center) 문제를 확장하여, 가중치를 사전에 정해진 점에 자유롭게 배정함으로써 전체 시스템의 최악 이동 시간을 최소화하는 새로운 최적화 모델을 제시한다. 문제 정의는 다음과 같다: 평면에 존재하는 n개의 점 P와 양의 실수 가중치 multiset W={w₁,…,w_k} (k ≤ n)가 주어지면, 각 가중치를 서로 다른 k개의 점에 할당하고 나머지 n−k개의 점에는 기본 가중치 1을 부여한다. 할당 함수 f에 대해 가중치 중심 c(f)는 모든 점 p∈P에 대해 d(p,c)/f(p)의 최댓값을 최소화하는 점이며, 이 최댓값을 커버링 반경 r(f)라 정의한다. 목표는 r(f)를 최소화하는 할당 f*를 찾는 것이다.
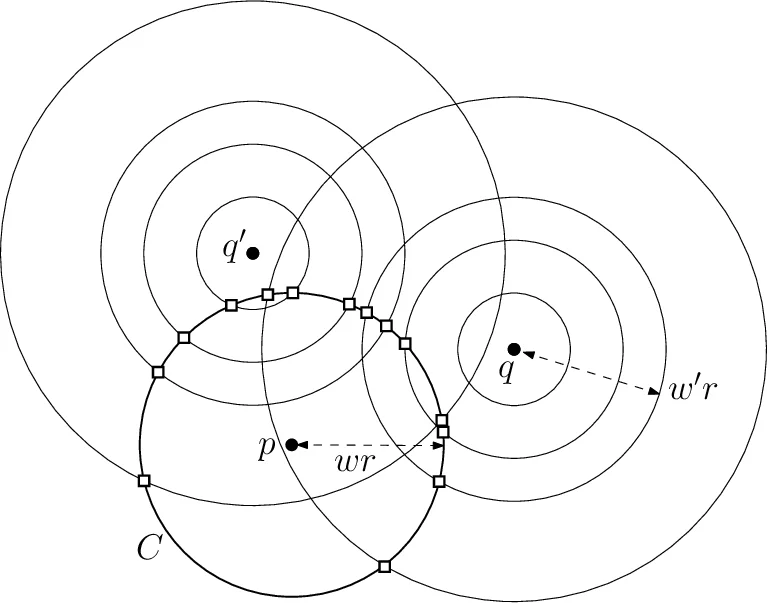
알고리즘 설계의 핵심은 “가중치 중심은 최대 세 점에 의해 결정된다”는 기하학적 사실이다. 즉, 어떤 할당에 대해서도 최적 중심은 세 개 이하의 가중치 점들의 가중 거리 등식이 동시에 만족되는 교점에 위치한다. 이를 이용해 가능한 가중치 중심 후보의 수를 O(k³n³)으로 제한한다. 첫 번째 알고리즘은 이 후보들을 전부 탐색하는 대신, 주어진 반경 r에 대해 “반경 r 이하의 가중치 중심이 존재하는가?”를 판정하는 결정 절차를 설계한다. 판정은 각 점 p에 대해 반경 w·r (w∈W∪{1})인 원을 그고, 이 원들 사이의 교차 구간을 조사함으로써 수행된다. 전체 원들의 배열 구조를 O(k²n²log³n) 시간에 구축하고, 이를 바탕으로 이진 탐색과 파라메트릭 서치를 결합해 최적 반경을 찾는다.
두 번째 알고리즘은 가중치가 1 이하라는 추가 가정을 활용한다. 이 경우 각 원의 반경이 서로 겹치는 구조가 제한적이므로, 원들의 교차점들을 효율적으로 정렬하고, 각 교차점에 대해 가능한 할당을 검증하는 과정을 가속화한다. 결과적으로 O(k⁵n log³k + kn log³n) 시간 복잡도를 얻으며, k가 상수이면 O(n log³n)이라는 거의 선형 시간에 문제를 해결한다. 두 알고리즘 모두 파라메트릭 서치와 Megiddo식 최적화 기법을 사용하지만, 근본적인 다항식 근의 정확한 계산이 필요 없는 구조적 특성을 이용해 구현 난이도를 크게 낮췄다.
이 논문은 로봇 재충전 시설 배치, 이동 로봇의 속도 차이 보정, 네트워크 중심 재조정 등 다양한 실용적 시나리오에 적용 가능하며, 가중치 할당을 통한 전역 최적화라는 새로운 관점을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기