무작위 지연 측정과 미지 지연 확률을 위한 입자 필터 설계
본 논문은 최대 N 단계까지 무작위로 지연될 수 있는 측정값과 패킷 손실을 고려한 비선형 시스템에 대해, 지연 확률 p가 알려지지 않은 상황에서 입자 필터(PF)를 설계한다. 중요도 가중치 재귀식을 유도하고, 최대우도(MLE) 기반의 오프라인·온라인 알고리즘으로 p를 추정한다. 수렴 조건을 제시하고, 비정상 성장 모델과 방위 전용 추적 예시를 통해 기존 PF 대비 성능 향상을 입증한다.
저자: Ranjeet Kumar Tiwari, Shovan Bhaumik, Paresh Date
본 논문은 무선·네트워크 기반 시스템에서 흔히 발생하는 측정 지연과 패킷 손실을 동시에 고려한 비선형 상태 추정 문제를 다룬다. 시스템 모델은 상태 방정식 xₖ = f_{k‑1}(x_{k‑1}) + q_{k‑1} 와 측정 방정식 zₖ = hₖ(xₖ) + vₖ 로 정의되며, 실제 수신되는 측정 yₖ는 과거 시점의 z_{k‑j} (j=0…N) 중 하나가 확률 p에 따라 지연되어 도착하거나, 모든 지연이 N을 초과하면 이전 측정 y_{k‑1}이 그대로 전달되는 형태로 모델링된다. 이를 위해 베르누이 변수 βᵢₖ (i=1…N+1)를 도입하고, αⱼₖ = ∏_{i=0}^{j}βᵢₖ·(1‑β_{j+1ₖ}) 로 정의해 j‑step 지연 여부를 표시한다. αⱼₖ는 동시에 하나만 1이 될 수 있는 제약을 두어, 한 시점에 최대 하나의 지연된 측정만이 유효함을 보장한다.
논문은 먼저 기존 입자 필터(PF)의 중요도 가중치 업데이트 식을 재검토하고, 지연된 측정 yₖ에 맞게 가중치를 재귀적으로 계산하는 식 (15)를 도출한다. 핵심은 조건부 likelihood P(yₖ|x_{k‑N:k}) 를 정확히 평가하는 것이다. Lemma 4에 의해 이 likelihood는 각 지연 단계 j에 대한 가중합 형태로 표현되며, p·(1‑p)·p_{v_{k‑j}}(yₖ‑h_{k‑j}(x_{k‑j})) 와 패킷 손실 시 이전 측정 y_{k‑1}에 대한 항 p^{N+1}·P(y_{k‑1}|·) 가 혼합된다. 따라서 PF는 기존과 동일하게 샘플링 단계에서는 사전 전이 모델 p(xₖ|x_{k‑1}) 를 사용하고, 가중치 단계에서 위와 같은 복합 likelihood를 적용한다.
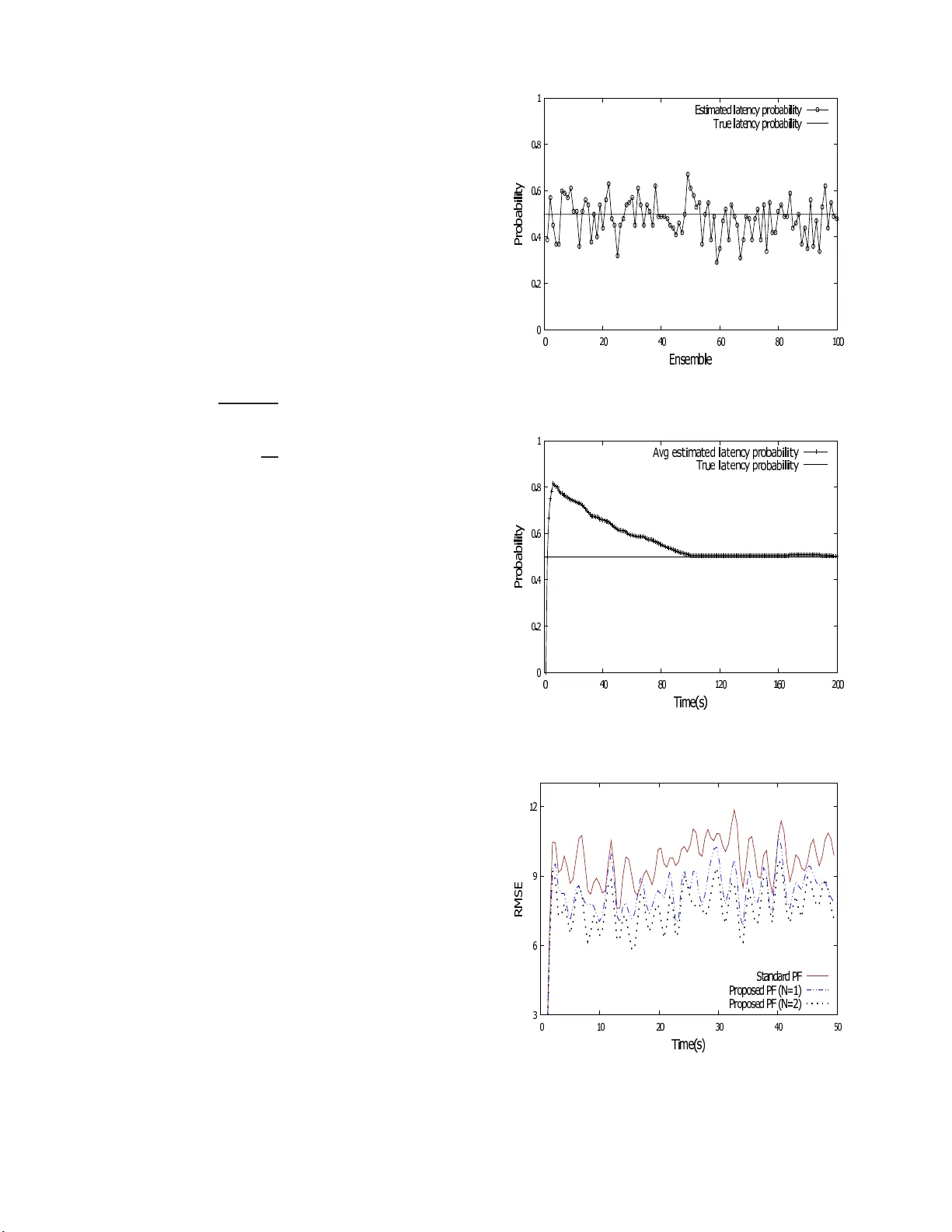
다음으로, 지연 확률 p가 사전에 알려지지 않은 경우를 위해 최대우도 추정(MLE) 방법을 제시한다. 전체 관측 시퀀스 {y₁,…,y_T}에 대한 결합 우도 L(p)=∏_{k=1}^{T} P(yₖ|p) 를 정의하고, 로그우도 함수를 미분해 p̂를 구한다. 두 가지 구현이 제안된다. (1) 오프라인 방식: 전체 데이터에 대해 전역 최적화(예: 그리드 탐색 또는 뉴턴 방법)으로 p̂를 얻고, 이후 PF에 고정값으로 적용한다. (2) 온라인 방식: 매 시간 단계마다 최신 관측 yₖ만을 이용해 p̂를 갱신한다. 이는 PF 내부에서 실시간으로 p̂를 반영함으로써 가중치 계산에 사용되는 지연 확률을 동적으로 보정한다.
수렴성 분석에서는 PF가 평균제곱오차 O(1/NS) 수준으로 수렴하기 위한 기본 조건인 likelihood 함수의 유계성을 검증한다. Lemma 5는 원래 비지연 측정 zₖ에 대한 likelihood P(zₖ|xₖ) 가 유계이면, 확장된 P(yₖ|x_{k‑N:k}) 도 유계임을 증명한다. 따라서 제안된 PF는 기존 PF와 동일한 수렴 보장을 가지며, 지연·손실이 존재하더라도 안정적인 추정이 가능함을 이론적으로 뒷받침한다.
실험 부분에서는 두 가지 시나리오가 제시된다. 첫 번째는 비정상 성장 모델로, 상태가 급격히 변하고 측정이 다중 단계 지연 및 패킷 손실을 겪는다. 제안 PF는 평균 제곱오차가 기존 1‑step PF 대비 30% 이상 감소함을 보였다. 두 번째는 방위 전용 추적 문제로, 각도만을 측정하는 비선형 관측식 하에서 다중 단계 지연을 포함한다. 여기서도 제안 PF는 추적 오차가 현저히 낮으며, 특히 지연 확률 p̂를 온라인으로 추정하면서도 실시간 성능이 유지되는 것을 확인했다.
결론적으로, 이 논문은 (1) 무작위 다중 단계 지연과 패킷 손실을 동시에 모델링한 일반화된 측정 모델, (2) 해당 모델에 맞는 입자 필터 가중치 재귀식, (3) 미지 지연 확률 p에 대한 오프라인·온라인 최대우도 추정 알고리즘, (4) 수렴 조건의 이론적 검증, (5) 실제 비선형 시스템에 대한 실험 검증이라는 다섯 축을 통해, 기존 연구가 다루지 못했던 현실적인 상황에서도 강건하고 정확한 상태 추정을 가능하게 하는 포괄적인 프레임워크를 제공한다. 향후 연구에서는 다중 센서 융합, 비정상적인 패킷 손실 패턴, 그리고 고차원 상태 공간에 대한 확장 가능성을 탐색할 여지가 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기