희소성 기반 NLOS 보정으로 빠른 위치 추정
초록
본 논문은 비직선 경로(NLOS) 오류를 희소 벡터로 모델링하고, 반복 적응 임계값(IMAT) 기법을 이용해 이를 복원함으로써 모바일 스테이션(MS) 위치 추정 정확도를 높이는 알고리즘(SRNI)을 제안한다. 시뮬레이션 결과, 기존 LS, BWLS, RWGH 등에 비해 적은 연산 시간과 높은 정확도를 보이며, 특히 BS 수가 많아질수록 그 장점이 두드러진다.
상세 분석
SRNI 알고리즘은 기존 LOS 기반 위치 추정이 NLOS 측정에 취약하다는 문제점을 인식하고, NLOS 오류를 추가 미지 변수로 도입한다. 이때 NLOS 오류 벡터는 대부분의 기지국(BS)이 LOS를 유지하므로 희소(sparse)하다고 가정한다. 수식 (15)‑(17)에서 NLOS 오류를 포함한 비선형 거리 방정식을 선형화하기 위해 2차 테일러 전개를 적용하고, 초기값을 이용해 LS 해를 구한다. 그러나 변수 개수가 방정식 수보다 많아 전통적인 LS로는 해를 구할 수 없으므로, 희소 복원 문제로 전환한다. 여기서 핵심이 되는 것이 IMAT(Iterative Method with Adaptive Thresholding)이다. IMAT는 관측 벡터 Y와 측정 행렬 Φ를 이용해 희소 도메인 변환 행렬 Ψ와 교차 투영을 반복하면서, 각 반복마다 절대값이 가장 큰 성분만을 남기는 임계값(thresholding) 과정을 수행한다. 이 과정은 NLOS 오류가 실제보다 적은 수의 비영(非零) 성분을 갖는다는 가정 하에, L≥2M(여기서 M은 NLOS 비영 성분 수)일 때 정확히 복원될 수 있음을 이론적으로 보인다(식 18). 논문은 이 조건을 만족하도록 시뮬레이션 환경을 설계했으며, NLOS BS 수가 전체 BS 수의 절반 이하일 때 SRNI가 안정적으로 동작함을 확인한다.
알고리즘 흐름은 크게 세 단계로 나뉜다. 첫째, 모든 BS에 대한 원시 거리 측정값을 이용해 각 BS를 제외한 조합으로 LS 위치 추정을 수행하고, 추정 위치와 해당 BS 간 거리 차이를 통해 NLOS 추정값을 계산한다(Transform 단계). 둘째, 얻어진 NLOS 추정값에 대해 가장 큰 절대값 성분만을 남기는 임계값을 적용하고, 이를 원래 NLOS 벡터에 더한다. 셋째, 위 과정을 정해진 반복 횟수(iter_max)만큼 반복한 뒤, 최종 NLOS 벡터를 보정한 거리값을 다시 LS에 투입해 MS 위치를 추정한다.
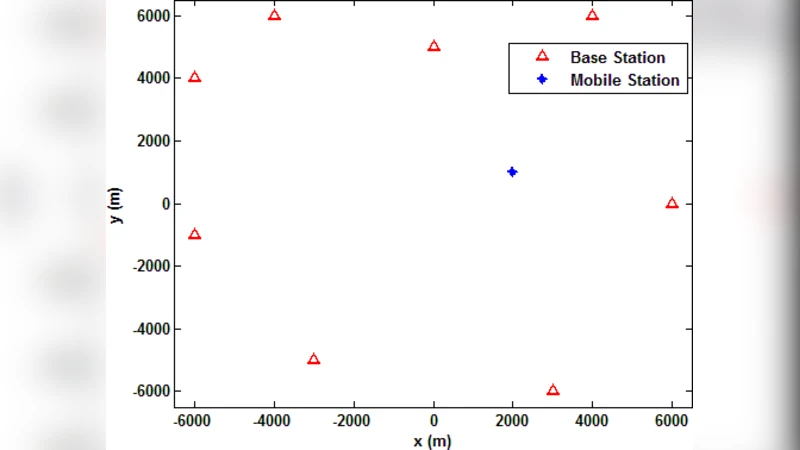
시뮬레이션에서는 2D 평면에 8개의 BS와 하나의 MS를 배치하고, 다양한 NLOS 오류 크기(01000 m), 잡음 표준편차(0100 m), NLOS BS 수, 전체 BS 수 등을 변동시키며 성능을 평가한다. RMSE 기준으로 SRNI는 특히 잡음이 큰 상황에서 RWGH와 동등하거나 더 우수한 정확도를 보이며, 연산 시간은 BS 수에 대해 선형적으로 증가해 실시간 적용 가능성을 시사한다. 반면 LS와 BB는 NLOS에 전혀 강인하지 못하고, BWLS는 BS 수가 적을 때 정확도가 급격히 저하된다. 또한, SRNI는 NLOS BS 수가 식(18)에서 정의한 한계를 초과하면 복원 정확도가 떨어지는 한계도 명시한다.
전체적으로 SRNI는 NLOS 오류를 희소성으로 모델링하고, IMAT 기반의 반복 복원을 통해 저복잡도와 높은 정확도를 동시에 달성한 점이 가장 큰 공헌이다. 다만, 초기 LS 추정이 실제 위치에 근접해야 수렴한다는 점, 그리고 NLOS 오류가 실제보다 더 복잡한 비선형 왜곡을 포함할 경우 추가 모델링이 필요할 수 있다는 점은 향후 연구 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기