엣지와 클라우드 결합을 통한 이동성 분석
초록
본 포스터는 교통 차량에 장착된 모바일 포그 노드에서 수집된 실시간 교통 데이터 스트림을 엣지에서 전처리하고, 클라우드에서 그래프 기반 분석을 수행하는 하이브리드 아키텍처를 제안한다. 데이터 정제·컨텍스트화는 엣지에서, 복잡한 그래프 쿼리와 시계열 분석은 Neo4j와 Spark GraphX를 활용한 클라우드에서 이루어진다. 실험 결과는 버스 정류장·이동 패턴을 시각화하고, 정류장 혼잡도와 최단 경로를 효과적으로 도출함을 보여준다.
상세 분석
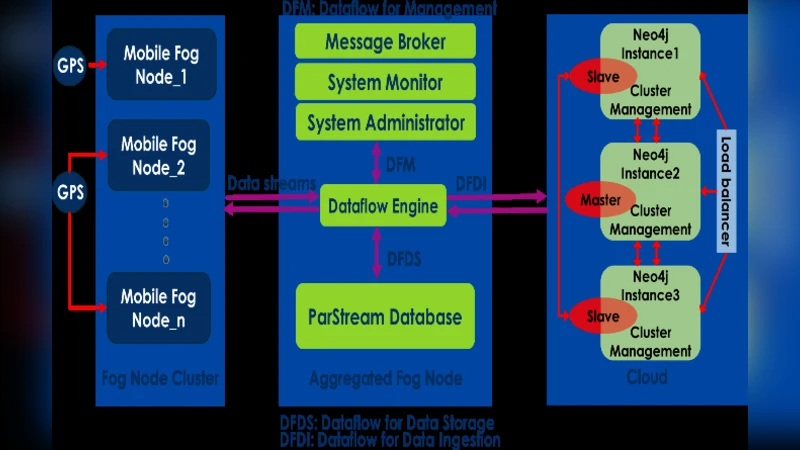
이 연구는 IoMT 환경에서 발생하는 대용량, 고속, 순서가 뒤섞인 튜플 스트림을 효율적으로 관리하기 위해 3계층(센싱‑엣지‑클라우드) 구조를 설계하였다. 센싱 계층은 버스 내부에 설치된 Cisco 829 GW‑LTE‑NA‑AK9 라우터를 이용해 GPS, 라우트 ID, 타임스탬프 등을 5초 간격 등 다양한 주기로 수집한다. 수집된 원시 튜플은 모바일 포그 노드에서 파이썬 기반 정제 스크립트에 의해 결측·중복·속성 오류를 자동으로 교정한다. 이어서 Aggregated Fog Node에 배치된 Edge Fog Fabric(EFF) 플랫폼이 데이터 흐름을 제어하고, ParStream 데이터베이스를 통해 연속적인 튜플을 저장·전달한다. EFF는 데이터 플로우 편집기, 엔진, 모니터링, 메시지 브로커 등을 포함해 실시간 필터링·클렌징·컨텍스트화 작업을 수행한다.
컨텍스트화 단계에서는 각 튜플의 좌표(x, y)와 타임스탬프(t)를 이용해 연속 두 점 사이의 유클리드 거리를 계산하고, 15 m 이하이면 ‘stop’, 초과이면 ‘move’ 라는 속성을 부여한다. 이와 같이 라벨링된 스트림은 시간 트리 구조를 갖는 정적 그래프 스냅샷으로 변환되어 클라우드의 Neo4j에 저장된다. 클라우드에서는 Spark GraphX와 연동된 Neo4j 엔진을 활용해 최단 경로, 정점 차수, PageRank 등 그래프 메트릭을 시계열적으로 쿼리한다. 결과는 시간대별 버스 정류장·이동 패턴을 시각화한 그래프 형태로 제공되며, 교통 혼잡 구간(빨간 노드)과 자유 이동 구간(녹색 노드)을 명확히 구분한다.
실험은 캐나다 몬크턴 지역 CODIAC 교통 데이터(642 정류장, 30 노선)를 사용했으며, 2016년 6월 8일의 피크 시간대에 수행된 최단 경로 쿼리는 교통 정체가 발생한 정류장을 빨간색으로, 정상 이동 구간을 녹색으로 표시했다. 또한 정점 차수와 PageRank 결과는 Plaza, Champlain Street, Main Street와 같은 주요 정류장의 이용 빈도가 높음을 확인시켰다.
이 시스템은 데이터 흐름을 엣지와 클라우드 사이에 명확히 분리함으로써, 대규모 스트림을 클라우드에 그대로 전송하는 비용을 절감하고, 실시간 분석 요구를 만족한다. 향후 연구에서는 양방향 데이터 플로우(클라우드→엣지)와 EFF를 모든 계층에 배포하는 방안을 모색하고, 확장성·속도·복잡도 문제를 해결하기 위한 통합 워크플로우 설계가 필요하다.
댓글 및 학술 토론
Loading comments...
의견 남기기