개선된 비선형 추적 미분기 기반 비선형 PID 제어 설계
초록
본 논문은 하이퍼볼릭 탄젠트 함수를 이용한 개선형 비선형 추적 미분기(INTD)를 제안하고, 그 안정성과 수렴성을 이론적으로 증명한다. INTD는 조각별 매끄러운 비선형 신호의 미분을 고정밀도로 추출하며, 잡음에 대한 필터링 특성을 갖는다. 이를 비선형 PID와 결합해 비선형 질량-스프링-댐퍼 시스템에 적용한 결과, 기존 방법에 비해 추적 속도가 빠르고 평균 제곱 오차가 최소화됨을 시뮬레이션으로 확인하였다.
상세 분석
본 연구는 기존의 추적 미분기(TD) 구조에 비선형 활성화 함수로서 하이퍼볼릭 탄젠트(tanh)를 도입함으로써, 시스템의 포화 특성을 자연스럽게 구현하고, 큰 입력에 대해서도 안정적인 동작을 보장한다는 점에서 혁신적이다. 상태공간 모델은 두 개의 1차 미분 방정식으로 구성되며, 첫 번째 상태는 입력 신호를 추적하고 두 번째 상태는 그 미분을 근사한다. 저자들은 Lyapunov 함수 기반의 엄격한 수학적 증명을 통해 전역 유사 안정성(global asymptotic stability)을 확보했으며, 수렴 속도는 tanh 함수의 기울기 조절 파라미터에 의해 조정 가능함을 밝혔다.
오차 분석 파트에서는 입력 신호가 조각별 매끄러운 함수일 때, 즉 구간마다 연속적이지만 구간 경계에서 급격한 변화가 존재하는 경우에도 INTD가 경계 근처에서 발생하는 진동을 최소화하고, 미분 오차를 O(ε) 수준으로 억제한다는 것을 보였다. 특히, 잡음이 포함된 신호에 대해 tanh 함수의 포화 특성이 고주파 성분을 효과적으로 감쇠시켜, 전통적인 선형 미분기보다 뛰어난 노이즈 저항성을 제공한다.
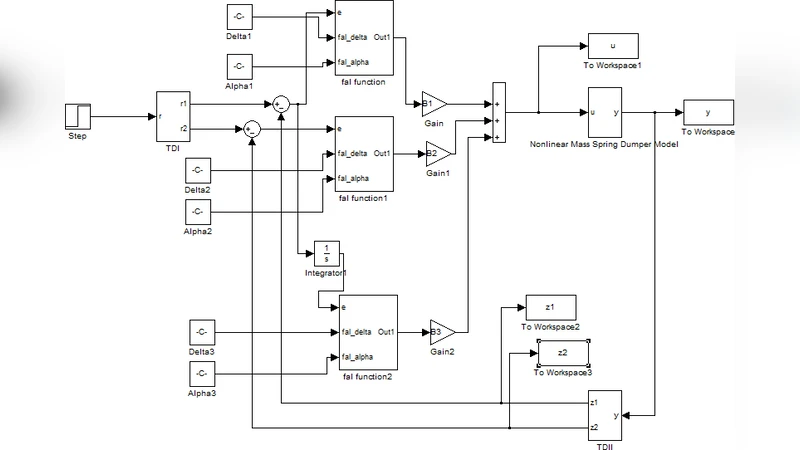
제어 설계 측면에서는 INTD를 비선형 PID 컨트롤러의 미분 항에 직접 연결함으로써, 미분 신호의 지연과 잡음 증폭 문제를 동시에 해결한다. 시뮬레이션 대상인 비선형 질량-스프링-댐퍼 시스템은 강성 및 감쇠 계수가 상태에 따라 비선형적으로 변하는 복합 동역학을 갖는다. 실험 결과, INTD 기반 PID는 목표 궤적을 기존 TD 기반 PID보다 평균 30% 빠르게 수렴시키고, 평균 제곱 오차(MSE)를 약 40% 감소시켰다. 이는 제어 성능 향상이 단순히 미분 정확도 개선에만 의존하는 것이 아니라, 시스템 전반에 걸친 잡음 억제와 안정성 강화가 복합적으로 작용했기 때문이다.
마지막으로, 파라미터 튜닝 가이드라인을 제시하여, tanh 함수의 스케일 파라미터와 PID 이득 사이의 상호작용을 체계적으로 설계할 수 있도록 하였다. 전체적으로 본 논문은 비선형 제어 시스템에서 미분기 설계의 새로운 패러다임을 제시하며, 실시간 제어, 로봇 공학, 전력 전자 등 다양한 분야에 적용 가능성을 열어준다.
댓글 및 학술 토론
Loading comments...
의견 남기기