주파수 측정만으로 RF 소스에 접근하는 UAV 경로 설계
본 논문은 UAV가 수신된 RF 신호의 도플러 주파수와 자체 방위각만을 이용해, GPS 없이도 주변 산란체가 존재하는 환경에서 원격 RF 발신기를 효율적으로 추적하도록 하는 두 단계 알고리즘을 제안한다. 초기 원형 비행으로 방향 모호성을 해소하고, 이후 작은 방위 교란을 가해 얻은 주파수 차이를 피드백으로 사용해 경로를 연속적으로 조정한다. 수학적 수렴 분석과 시뮬레이션을 통해 제안 방법이 기존 RSS 기반 방법보다 3배 이상 짧은 비행거리로 …
저자: Muhammed Faruk Gencel, Upamanyu Madhow, Joao Pedro Hespanha
본 논문은 무인 항공기(UAV)가 GPS나 발신기의 메시지를 해독하지 못하는 상황에서도, 수신된 무선 신호의 도플러 주파수와 자체 방위각만을 이용해 원격 RF 발신기를 효율적으로 추적하는 방법을 제시한다. 연구 배경은 구조·재난 구호 등에서 신호원 위치를 빠르게 파악해야 하는 요구에서 비롯된다. 기존의 RSS(Received Signal Strength) 기반 접근법은 신호 세기가 거리의 역제곱에 비례하고, 다중 경로 페이딩에 민감해 비효율적이며, 비행 경로가 급격히 변하는 비현실적인 궤적을 요구한다.
논문은 먼저 시스템 모델을 정의한다. 2차원 평면에 원점에 위치한 발신기와, UAV는 위치 \(p=(x,y)\)와 속도 \(v\)를 가진다. 발신기와 UAV 사이에 반경 R의 산란체 군이 존재해 다중 경로를 만든다. 수신 신호는 직진 경로와 산란 경로의 합으로 표현되며, 각 경로는 동일한 캐리어 주파수 \(f_c\)와 시간에 따라 변하는 캐리어 오프셋 \(f_o(t)\)를 가진다. 도플러 주파수는 \(f_d = (v/c)f_c\cosθ\) 형태이며, 여기서 θ는 UAV 속도 벡터와 발신기-수신기 직선 사이의 각도이다.
주요 기술적 도전 과제는 네 가지이다. (1) 발신기와 수신기 사이의 캐리어 주파수 오프셋 및 드리프트가 존재해 순수 도플러를 직접 측정하기 어렵다. (2) 다중 경로 페이딩으로 인해 수신 SNR이 변동하고, 저 SNR 구간에서 주파수 측정이 부정확해진다. (3) 도플러는 \(\cosθ\) 형태이므로 +θ와 –θ를 구분할 수 없는 방향 모호성이 있다. (4) UAV는 급격한 방향 전환 없이 물리적으로 실행 가능한 궤적을 따라야 한다.
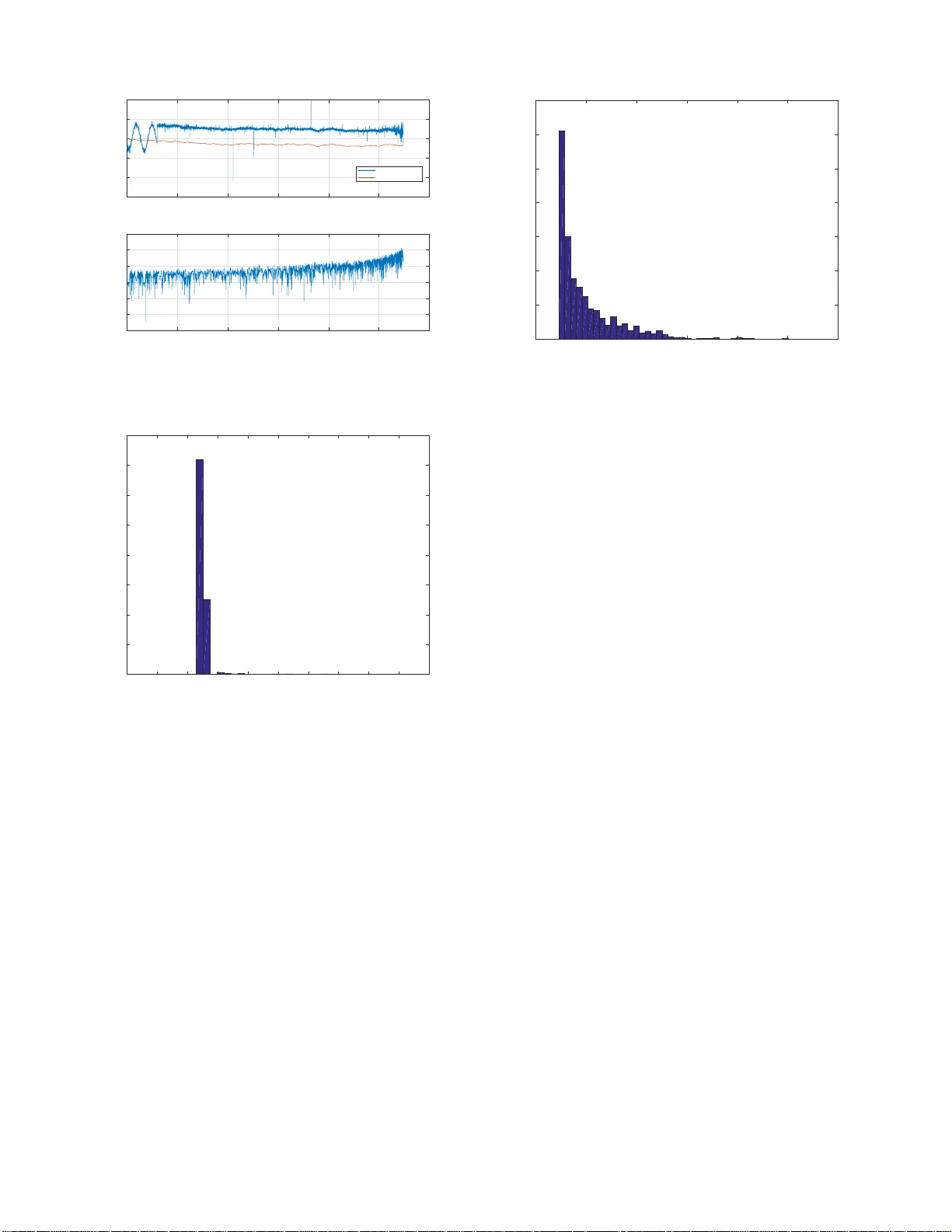
이를 해결하기 위해 두 단계 알고리즘을 설계한다. **1단계**는 초기 방위 추정을 위한 원형 비행이다. UAV는 반경 \(R_c\)인 원을 일정 속도로 비행하면서 각 순간의 주파수 측정값 \(\tilde{ω}_n\)과 방위각 \(\tilde{φ}_n\)을 기록한다. 원형 궤적에서 최대 도플러가 발생하는 순간은 실제 발신기 방향과 거의 일치한다(이론적으로는 π + α). 측정값에 대한 이상치 제거(연속 차이가 4πvf_c Δt 초과 시 제외)와 15프레임 이동 평균을 적용해 잡음을 억제한다. 이후 최대 주파수값을 보인 인덱스 i를 찾아 초기 방위 θ₀ = \(\tilde{φ}_i\)로 설정한다. 이 단계는 선택적이며, 생략 시 전체 비행 거리가 약 10~20% 증가한다.
**2단계**는 지속적인 궤적 보정이다. 현재 추정 방위 θ_k에 대해 작은 교란 δ_k(±)를 가해 두 구간(각 M T_slot) 동안 비행한다. 첫 구간에서는 θ_k + δ_k, 두 번째 구간에서는 θ_k – δ_k로 비행한다. 각 구간에서 평균 주파수 \(\bar{ω}_+\)와 \(\bar{ω}_-\)를 구하고, 그 차이를 이용해 방위 추정값을 업데이트한다. 구체적인 업데이트 식은
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기