스마트 차량을 위한 실시간 맥락 요구사항 적응 프레임워크 SACRE
초록
SACRE는 런타임 불확실성 하에서 컨텍스트 요구사항을 자동으로 탐지·분석·재운용하는 MAPE‑K 기반 피드백 루프와 분산 제어 아키텍처를 제시한다. 기존 ACon을 확장해 정책‑기반 운영, 옵저버‑옵저버블 패턴, 그리고 3‑계층 협업 제어 패턴을 도입했으며, 스마트 차량 시뮬레이션 환경에서 실시간 적응 정확도와 응답 시간을 검증하였다.
상세 분석
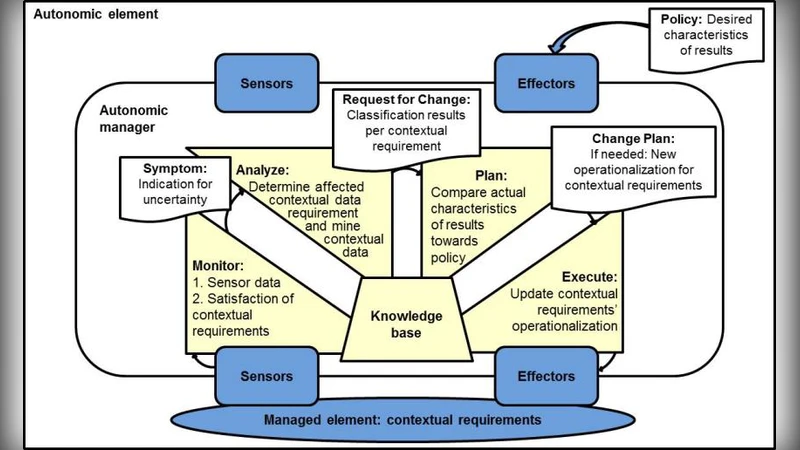
본 논문은 현대 자율·스마트 시스템이 직면한 런타임 불확실성(자원 가용성 변동, 환경 변화, 사용자 요구 급변, 침입·결함 등)을 맥락 요구사항(contextual requirements) 수준에서 해결하고자 한다. 기존 연구인 ACon은 MAPE‑K 루프를 이용해 불확실성에 영향을 받는 요구사항을 탐지하고 머신러닝 기반으로 컨텍스트를 재운용했지만, 제어의 중앙집중화, 루프 요소의 소프트웨어 매핑, 분산 협업 메커니즘이 부족했다는 한계를 지적한다. SACRE는 이러한 한계를 극복하기 위해 다음과 같은 핵심 설계를 제시한다.
-
참조 아키텍처와 MAPE‑K 매핑: 모니터(Monitor), 분석(Analyze), 계획(Plan), 실행(Execute), 지식(Knowledge) 각각을 독립 서비스 컴포넌트로 구현하고, 이들 간 통신을 옵저버‑옵저버블 패턴으로 탈결합한다. 이를 통해 각 컴포넌트는 로컬 컨텍스트 데이터를 실시간으로 수집하고, 중앙 데이터베이스 없이도 분산 환경에서 일관된 지식을 유지한다.
-
분산·협업 제어 패턴: 기존의 단일 루프를 3‑계층(센서·엣지, 지역 제어, 글로벌 조정) 구조로 확장한다. 각 계층은 자체 MAPE‑K 사이클을 보유하며, 상위 계층에 정책을 전파하고 하위 계층은 로컬 상황에 맞는 적응 결정을 내린다. 이 설계는 스마트 차량처럼 지연 민감도가 높은 도메인에서 네트워크 지연이나 부분 장애가 발생해도 시스템 전체가 멈추지 않도록 보장한다.
-
머신러닝 기반 컨텍스트 운영화: 센서 스트림에서 추출한 피처를 실시간 분류·회귀 모델에 입력해 현재 컨텍스트를 추정한다. 모델은 온라인 학습을 지원해 새로운 환경(예: 눈보라, 도로 공사)에도 빠르게 적응한다. 모델 출력은 요구사항의 ‘컨텍스트’ 부분을 업데이트하고, 이에 따라 ‘예상 시스템 행동’이 재평가된다.
-
정책 기반 의사결정: 요구사항 적응은 사전 정의된 정책 집합에 의해 제어된다. 정책은 목표(안전, 연비, 사용자 편의)와 제약(법규, 하드웨어 한계)을 명시하며, 다중 목표 간 트레이드오프를 다중 기준 의사결정 기법으로 해결한다.
-
스마트 차량 시뮬레이션 평가: 구현된 SACRE를 차량 시뮬레이터(센서, 액추에이터, 통신 모듈)와 연동해 3가지 불확실성 시나리오(센서 고장, 급격한 날씨 변화, 네트워크 지연)를 실험했다. 결과는 평균 적응 지연이 150 ms 이하이며, 요구사항 충족률이 92 %에 달함을 보여, 실시간 제어 요구를 만족한다는 점을 입증한다.
이러한 설계는 기존 연구가 주로 중앙집중식 MAPE‑K 구현에 머물렀던 점을 넘어, 분산·협업 제어와 온라인 학습을 결합함으로써 현대 복합 시스템에서 요구되는 확장성, 탄력성, 실시간성을 동시에 달성한다는 점에서 의의가 크다. 또한, 요구사항‑컨텍스트 쌍을 2‑튜플로 명시하고 이를 동적으로 재운용하는 방법론은 요구사항 공학과 적응 제어 사이의 간극을 메우는 실용적 프레임워크로 평가할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기