Dubins 여행 판매원 최적값을 위한 긴밀한 하한 기법
초록
본 논문은 Dubins 제약을 갖는 여행 판매원 문제(DTSP)의 최적값을 평가하기 위한 새로운 하한 계산 방법을 제시한다. 목표는 각 목표점에서 허용 각도 구간을 정의하고, 구간 간 최단 Dubins 경로를 구해 ‘one‑in‑a‑set’ TSP 형태로 변환한 뒤, 이를 정확히 풀어 DTSP에 대한 실용적인 하한을 얻는 것이다. 논문은 구간 기반 하한 문제를 수학적으로 정식화하고, Dubins 구간 문제를 해결하기 위한 단조성 및 경계값 분석 알고리즘을 개발하였다. 실험 결과, 기존 Euclidean TSP 기반 하한보다 30%~40% 정도 더 타이트한 하한을 제공함을 보였다.
상세 분석
이 논문은 DTSP가 Euclidean TSP(ETSP)를 일반화한 NP‑hard 문제임을 전제로, 현재까지는 최적해를 찾는 알고리즘이 없고, ETSP를 풀어 얻는 하한이 실제 feasible solution과 큰 격차를 보인다는 실질적인 문제점을 지적한다. 저자들은 기존의 “one‑in‑a‑set” 접근법이 상한을 제공하지만, 하한을 얻기 위해서는 각 목표점에서 도착·출발 각도가 동일해야 하는 제약을 완화하고, 대신 각도를 사전에 정의된 구간에 제한하는 새로운 프레임워크를 제안한다. 이때 구간 선택은 각 목표점마다 하나씩 선택되며, 선택된 구간 내에서 도착·출발 각도가 자유롭게 변할 수 있다.
핵심 수학적 정의는 다음과 같다. 목표점 i의 허용 각도 집합 I_i를 m_i개의 폐구간으로 분할하고, 두 목표점 i, j 사이의 비용 d*{ij}(I_i, I_j)=min{θ_i∈I_i,θ_j∈I_j} d_{ij}(θ_i,θ_j) 로 정의한다. 여기서 d_{ij}(θ_i,θ_j) 는 Dubins 차량이 (x_i,y_i,θ_i)에서 (x_j,y_j,θ_j) 로 이동하는 최단 경로 길이이다. 이렇게 정의된 비용 행렬을 이용해 “one‑in‑a‑set TSP”를 구성하고, Noon‑Bean 변환을 통해 비대칭 TSP(ATSP)로, 다시 대칭 TSP로 변환한 뒤 Concorde 솔버로 최적 순회를 구한다.
하한을 실제 계산하기 위해서는 두 구간 사이의 최소 Dubins 경로, 즉 “Dubins Interval Problem”을 해결해야 한다. 저자들은 기존 Dubins 경로가 6가지 유형(RSR, RSL, LSR, LSL, RLR, LRL)으로 구성된다는 사실을 이용해, 각 유형에 대해 각도 구간의 경계값에서 최소값이 발생한다는 단조성 정리를 증명한다. 특히, 경로가 존재하고 곡선 구간이 사라지지 않을 경우, 경로 길이는 각도에 대해 전단조 혹은 후단조임을 보이며, 따라서 최적값은 구간의 양 끝점 혹은 두 구간이 겹치는 경우에만 발생한다는 결론을 도출한다.
정리 3.1은 최적 Dubins 구간 경로가 (1) 구간 경계값을 이용한 3‑세그먼트 경로 혹은 (2) 2‑세그먼트 경로 중 하나임을 명시한다. 이를 기반으로 저자들은 각 구간에 대해 가능한 2‑세그먼트 경로(RS, LS, SR, SL, RL, LR)의 최소값을 효율적으로 탐색하는 알고리즘을 설계한다. 이 알고리즘은 각 구간의 경계값을 직접 대입하고, 존재 여부와 비용을 검증함으로써 O(1) 연산에 가까운 속도로 최적값을 산출한다.
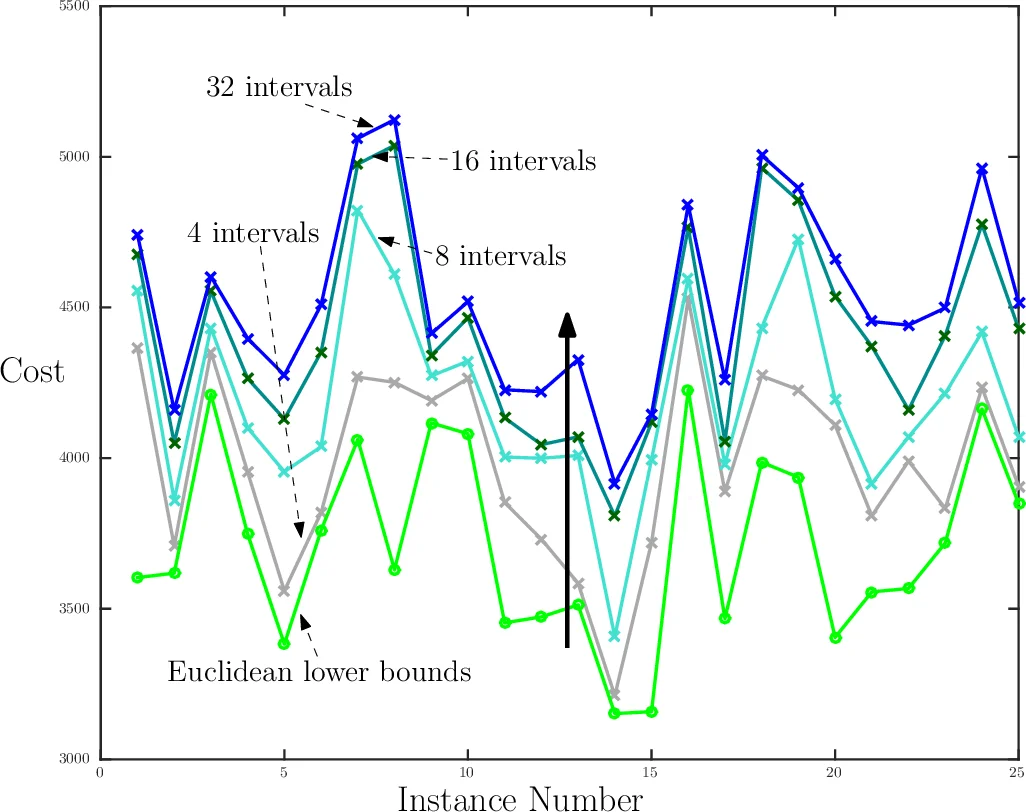
전체 하한 계산 흐름은 다음과 같다. (i) 목표점마다 각도 구간을 사전 정의(예: 4~8개 구간); (ii) 모든 목표점 쌍에 대해 Dubins Interval Problem을 해결해 d*_{ij} 값을 얻음; (iii) 얻은 비용 행렬을 이용해 one‑in‑a‑set TSP를 ATSP로 변환하고, Concorde로 최적 순회를 구함; (iv) 최적 순회 비용이 DTSP의 하한이 된다.
실험에서는 25개의 무작위 인스턴스(각 20개 목표점, 최소 회전 반경 100)를 대상으로 구간 수를 4, 8, 16으로 늘리며 하한을 측정하였다. 구간 수가 증가할수록 하한이 ETSP 기반 하한보다 크게 상승했으며, 16구간에서는 평균 35% 정도 더 타이트한 하한을 제공했다. 이는 기존 휴리스틱 알고리즘이 제공하는 상한과의 격차를 현저히 줄여, 실제 DTSP 솔루션의 품질을 정량적으로 평가할 수 있게 한다.
이 논문의 주요 기여는 (1) DTSP 하한을 “one‑in‑a‑set TSP” 형태로 체계화한 새로운 수학적 모델, (2) Dubins 구간 문제를 단조성 및 경계값 분석을 통해 효율적으로 해결하는 알고리즘, (3) 실험을 통한 하한의 타당성 검증이다. 또한, 제안된 프레임워크는 향후 상수‑팩터 근사 알고리즘 설계와, 최적 제어 기반 하한 기법과의 결합에도 활용 가능성을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기