사회로봇이 자폐 아동의 공동주의를 촉진할 수 있을까
초록
본 연구는 사회적 로봇과 인간이 공동주의를 유도하는 상황에서 자폐 스펙트럼 장애(ASD) 아동과 일반 발달(TD) 아동의 시선 행동을 비교하였다. 15명의 ASD 아동과 15명의 연령·성별이 일치하는 TD 아동을 대상으로 고정점, 시선 전이, 그리고 새로운 최장 공통 부분수열(LCS) 분석을 적용하였다. 결과는 ASD 아동이 인간 주도 상황보다 로봇 주도 상황에서 목표물에 대한 고정시간은 짧아졌지만, 로봇이 주의를 끌어 시선 전이와 공동주의 논리 수행이 향상됨을 보여준다. 또한 LCS 방법이 눈동자 궤적의 구조적 유사성을 정량화하는 데 유용함을 확인하였다.
상세 분석
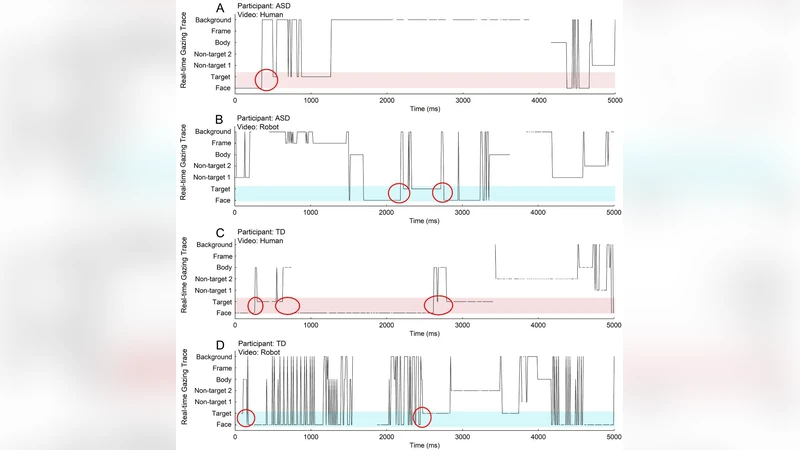
이 논문은 자폐 아동의 사회적 주의 결함을 보완하기 위한 로봇 기반 중재 가능성을 탐색한다는 점에서 학제간 연구의 좋은 사례다. 실험 설계는 ‘Human’과 ‘Robot’ 두 가지 이니시에이터 조건을 교차 적용했으며, 각 조건에서 아동은 화면에 나타나는 사회적 자극(인간 얼굴 혹은 로봇 얼굴)과 목표 물체(예: 장난감)를 관찰하도록 했다. 눈동자 추적 장치는 60 Hz 이상의 샘플링 레이트로 고정점(fixation)과 시선 전이(transition)를 정밀히 기록했으며, 기존 연구에서 주로 사용된 총 고정시간·고정횟수 외에 최장 공통 부분수열(LCS) 알고리즘을 도입해 시선 궤적의 순차적 패턴을 정량화했다. LCS는 두 시퀀스 간 가장 긴 공통 서열을 찾아내어, 아동의 시선 흐름이 ‘관찰 → 목표 → 공동주의’라는 논리적 흐름을 따르는 정도를 점수화한다.
결과는 두 가지 주요 차원을 드러낸다. 첫째, ASD 아동은 인간 이니시에이터 상황에서 목표물에 대한 고정시간과 고정횟수가 현저히 낮아, 전통적인 공동주의 결함을 재현했다. 둘째, 로봇 이니시에이터에서는 고정시간이 다소 감소했지만, LCS 점수가 상승하여 시선 전이가 보다 논리적인 순서를 따랐음이 확인되었다. 이는 로봇이 시각적·청각적 자극을 통해 아동의 주의를 효과적으로 끌어, 목표물로의 전이를 촉진함을 의미한다.
통계적 분석에서는 이중 요인 분산분석(ANOVA)와 사후 검정을 통해 그룹·조건 간 상호작용을 검증했으며, 효과 크기(Cohen’s d)와 신뢰구간을 제시해 결과의 실질적 의미를 강조했다. 또한 LCS 점수와 기존 고정시간·고정횟수 간의 상관관계를 탐색해, LCS가 기존 지표를 보완하는 독립적인 척도임을 입증했다.
연구의 제한점으로는 표본 규모가 작아 일반화에 한계가 있다는 점, 로봇과 인간의 외형·동작 차이가 완전히 통제되지 않았다는 점, 그리고 단일 세션 실험으로 장기 효과를 평가하지 못했다는 점을 들 수 있다. 향후 연구에서는 다양한 연령대와 ASD 스펙트럼 단계별로 확대된 표본을 사용하고, 로봇의 사회적 행동(표정, 제스처)을 단계적으로 조절해 효과를 비교하며, 다회기 중재 설계를 통해 지속적인 행동 변화를 측정할 필요가 있다.
전반적으로 이 논문은 LCS 기반 시선 분석이 눈동자 데이터의 시간적 구조를 포착하는 새로운 도구로서 가치를 입증했으며, 사회 로봇이 자폐 아동의 공동주의 발달을 지원할 수 있는 실증적 근거를 제공한다는 점에서 학술적·실용적 의의가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기