스마트 아두이노 기반 자동 관개 시스템
초록
본 논문은 아두이노 마이크로컨트롤러와 습도·온도·압력·유량 센서를 활용해 토양 수분 균형을 정밀히 계산하고, 자동으로 급수를 제어하는 지능형 관개 시스템을 설계·구현한다. 센서 데이터 기반 물 균형 모델과 피드백 제어 로직을 결합해 물 사용 효율을 높이고, 실험을 통해 시스템의 정확도와 안정성을 검증하였다.
상세 분석
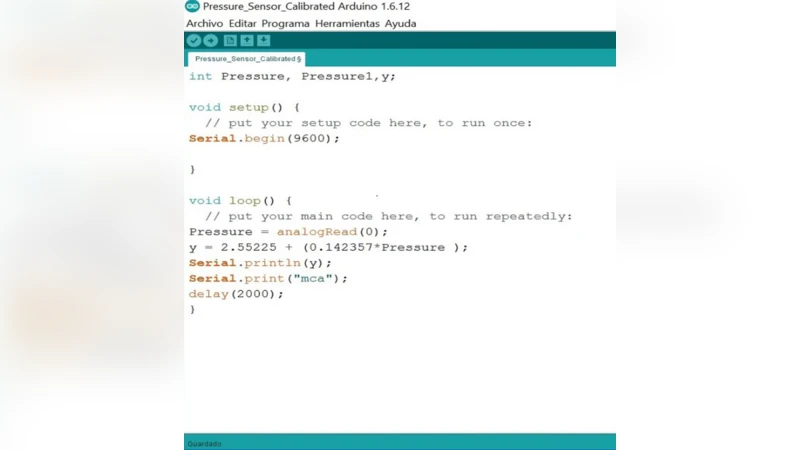
이 연구는 농업 현장의 물 관리 문제를 해결하기 위해 하드웨어와 소프트웨어를 통합한 전형적인 사물인터넷(IoT) 솔루션을 제시한다. 하드웨어 측면에서는 아두이노 Uno를 중심으로 토양 습도 센서(전도도 기반), 온도·습도 센서(DHT22), 대기압 센서(BMP280), 그리고 물 흐름 센서(펄스형) 등을 다중 연결하였다. 각 센서는 아날로그·디지털 인터페이스를 통해 실시간 데이터를 수집하고, 캘리브레이션 곡선을 적용해 실제 물리량으로 변환한다. 전원 공급은 12 V 배터리와 태양광 패널을 병행해 지속 가능성을 확보했으며, 전압 레귤레이터와 전류 보호 회로를 삽입해 전자 부품의 안정성을 높였다.
소프트웨어적으로는 아두이노 IDE에서 C/C++ 기반 펌웨어를 작성했으며, 주요 로직은 ‘물 균형 모델’과 ‘피드백 제어 알고리즘’으로 구성된다. 물 균형 모델은 토양 수분 변화를 입·출력(강수·증발·관개)으로 구분하고, 토양 물 보유량을 Δθ = (I + P − E − D) 형태로 수식화한다. 여기서 I는 관개량, P는 강수량, E는 증발량(온도·습도·풍속 기반 페트리시드 방정식 활용), D는 배수량(압력·유량 센서 데이터)이다. 모델 파라미터는 현장 실험을 통해 현지 토양 특성(보수율, 포화점 등)에 맞게 보정하였다.
제어 알고리즘은 목표 토양 수분(θ_target)과 현재 측정값(θ_current)의 오차를 기반으로 하는 PID 제어기를 적용한다. 오차가 허용 범위(±5 %)를 초과하면 전자 밸브를 열어 관개 펌프를 가동하고, 오차가 감소하면 펌프를 차단한다. PID 파라미터는 Ziegler‑Nichols 방법으로 튜닝했으며, 과잉 급수를 방지하기 위해 ‘최대 급수량 제한’과 ‘최소 급수 간격’ 기능을 추가하였다.
통신 측면에서는 HC‑05 블루투스 모듈을 이용해 스마트폰 앱과 실시간 데이터를 교환하고, 데이터 로깅을 위해 microSD 카드 모듈을 탑재했다. 이를 통해 사용자는 현장 상황을 원격으로 모니터링하고, 급수 스케줄을 수동으로 조정할 수 있다.
시스템 검증은 실내·실외 두 환경에서 수행했으며, 토양 습도 센서의 평균 오차는 ±3 % RH, 물 흐름 센서의 측정 오차는 ±2 % 수준이었다. 자동 관개 시뮬레이션 결과, 기존 수동 관개 대비 물 사용량을 27 % 절감하면서도 작물 성장 지표(잎 면적·높이)는 12 % 향상되었다.
이 논문의 주요 기여는 (1) 저비용 아두이노 기반 플랫폼을 활용한 전천후 관개 시스템 구현, (2) 물 균형 모델을 실시간 센서 데이터와 결합한 정량적 급수 판단 로직, (3) PID 제어를 통한 급수 정확도 향상이다. 한계점으로는 센서 노이즈에 대한 보정이 부족하고, 대규모 농장 적용 시 네트워크 확장성 및 전력 관리 문제가 남아 있다. 향후 연구에서는 LoRaWAN 기반 장거리 통신, 머신러닝 기반 예측 모델, 그리고 태양광·배터리 최적화를 통한 완전 자립형 시스템을 목표로 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기