모듈·통합 기반 자율주행 교육 혁신
초록
본 논문은 자율주행 기술을 모듈화하고 통합 실습 플랫폼을 활용해 단계별 학습을 제공함으로써, 다양한 배경을 가진 학생들이 효율적으로 자율주행 시스템을 이해하고 설계·구현 능력을 배양하도록 설계된 교육 방법론을 제시한다.
상세 분석
논문은 자율주행 교육을 ‘모듈·통합’ 접근법으로 재구성한다는 점에서 학문적·실무적 의의를 가진다. 먼저, 자율주행에 필요한 핵심 기술—센서 퍼셉션, 로컬라이제이션, 경로 계획, 제어, 시스템 통합—을 독립적인 학습 단위(모듈)로 정의하고, 각 모듈별 교재와 멀티미디어 강의를 제작하였다. 이는 학생들이 자신이 이미 익숙한 분야부터 시작해 점진적으로 새로운 영역을 습득하도록 설계된 ‘점진적 난이도 상승’ 전략이다.
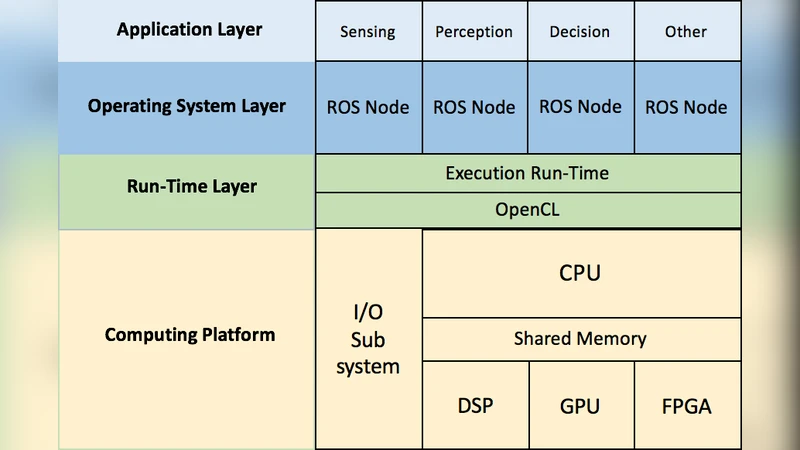
두 번째 핵심은 모듈 간 상호작용을 체험하게 하는 통합 실험 플랫폼이다. 저자들은 ROS 기반 시뮬레이터와 실제 차량 하드웨어(라즈베리 파이·GPU 보드 등)를 결합한 ‘통합 테스트베드’를 구축했으며, 각 모듈을 플러그인 형태로 교체·조합할 수 있게 함으로써 시스템 수준의 동작을 직접 관찰하게 한다. 이는 이론‑실습 간 격차를 최소화하고, 모듈 간 인터페이스 설계와 데이터 흐름 관리 같은 시스템 엔지니어링 역량을 자연스럽게 함양한다.
세 가지 사례 연구—기초 전공자 대상 입문 강의, 임베디드 시스템 과목에 삽입된 자율주행 세션, 산업 현장 전문가 대상 단기 교육—를 통해 교육 효과를 검증한다. 설문·성취도 분석 결과, 학생들은 친숙한 모듈부터 학습함으로써 학습 동기가 유지되고, 통합 실습 후에는 전체 파이프라인을 이해하는 데 큰 진전을 보였다. 특히, 임베디드 시스템 수업에 삽입된 경우, 기존 커리큘럼에 큰 부하 없이 최신 자율주행 기술을 적용할 수 있었으며, 산업 교육에서는 기존 경험을 바탕으로 빠른 적응이 가능했다는 점이 강조된다.
교육 설계상의 강점은 (1) 모듈화된 교재와 강의가 다양한 사전 지식을 가진 학습자에게 접근성을 제공, (2) 통합 플랫폼이 실시간 피드백과 오류 디버깅을 가능하게 하여 실무 감각을 배양, (3) 사례 기반 검증이 교육 모델의 일반화 가능성을 시사한다는 점이다. 한편, 제한점으로는 하드웨어 비용 문제, 모듈 간 인터페이스 표준화 부족, 그리고 평가가 주관적 설문에 의존한다는 점이 제시된다. 향후 연구에서는 오픈소스 표준 인터페이스 정의와 자동화된 평가 메트릭을 도입해 교육 효과를 정량화하고, 클라우드 기반 시뮬레이션 환경을 확대함으로써 비용 효율성을 높일 필요가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기