실내 내비게이션을 위한 9자유도 MEMS IMU 통계적 센서 융합
초록
본 논문은 9자유도 MEMS IMU와 자기계측기를 이용한 실내 자세 추정에 배치 최적화를 적용한 자동 보정 방식을 제안한다. 가속도계·자이로·자력계의 시스템오차를 동시에 추정하고, 상대 자기 측정 업데이트와 강인한 가중치 함수를 결합해 환경 자기왜곡에 강인하게 동작한다. 실험 결과, 10초 통합 후 위치 오차를 미터 수준에서 데시미터 수준으로 감소시켜, 방향 정확도는 80 % 이상, 위치 정확도는 73 %~93 % 향상시켰다.
상세 분석
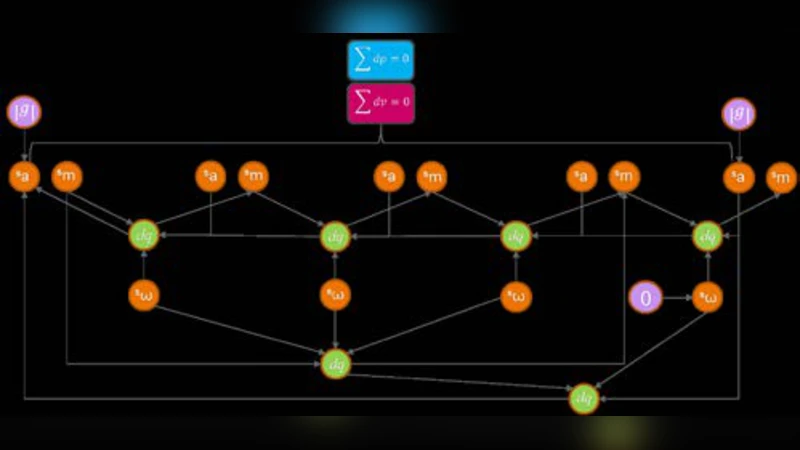
이 연구는 기존 9DoF IMU 기반 실내 내비게이션이 겪는 두 가지 근본적인 한계, 즉 자기장 왜곡에 대한 취약성과 외부 위치 보조 없이 발생하는 누적 드리프트 문제를 동시에 해결하려는 시도이다. 저자는 배치식 최소제곱 프레임워크 안에 가속도계, 자이로스코프, 그리고 자력계의 시스템 편향·스케일·비선형 오프셋을 포함하는 통합 보정 파라미터를 도입한다. 핵심은 ‘강인한 가중치 함수’를 사용해 관측치의 신뢰도를 동적으로 조정함으로써, 급격히 변하는 자기 환경에서도 안정적인 업데이트가 가능하도록 만든 점이다. 또한, 절대 자기장 대신 상대 자기 측정(두 연속 프레임 간 차분)을 활용해, 절대값에 의존하지 않는 자기 보정 메커니즘을 구현하였다. 이는 전통적인 EKF 기반 실시간 융합 방식이 종종 겪는 자기장 편향 누적 문제를 회피한다. 배치 최적화는 사후 처리(post‑processing) 형태이지만, 데이터 수집 후 충분히 긴 윈도우를 사용해 전역 최적화를 수행함으로써, 초기 추정값에 대한 의존성을 크게 낮춘다. 실험 설계는 포켓에 넣은 스마트폰, 손목시계, 그리고 전화기 화면을 확인하는 동작 등 다양한 사용자 행동과 복합적인 자기 환경을 모사했으며, 각 시나리오에서 10초 간의 통합 후 위치 오차가 0.8 m 수준에서 0.08 m 이하로 감소하는 것을 확인했다. 이러한 결과는 배치식 보정이 실시간 시스템에 비해 높은 정확도를 제공함을 시사한다. 다만, 배치 최적화는 실시간 적용이 어려우며, 계산 비용이 증가한다는 트레이드오프가 존재한다. 향후 연구에서는 이 강인 보정 모델을 실시간 필터와 결합하거나, 그래프 기반 SLAM에 통합해 실시간성 및 확장성을 확보할 필요가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기